本期创客项目介绍的是一个带显示屏的迷你超声波雷达。
顾名思义,如果雷达检测到前方物体,都将在屏幕上以红线显示。
本期创客项目依旧开源、依旧免费、依旧能在太极创客下载到所有相关资源。
迷你超声波雷达
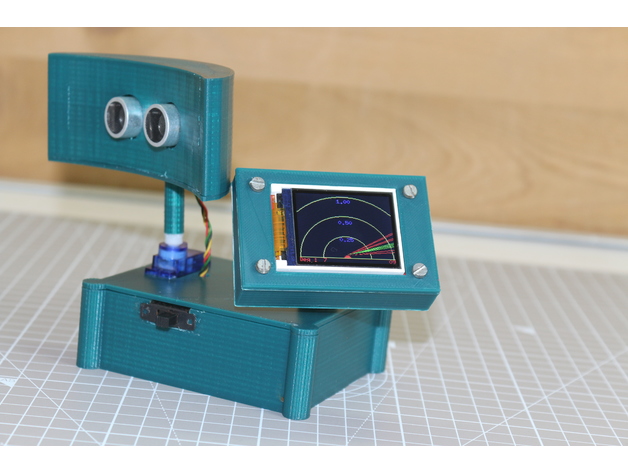
迷你超声波雷达,是一个带液晶显示屏的迷你小型雷达。使用了HC-SRO4超声波传感器(在本站有该模块的详细介绍和教程哦!)进行测距后返回数据通过液晶屏显示,并使用SG90舵机带动超声波模块进行旋转运动从而达到周向扫描。
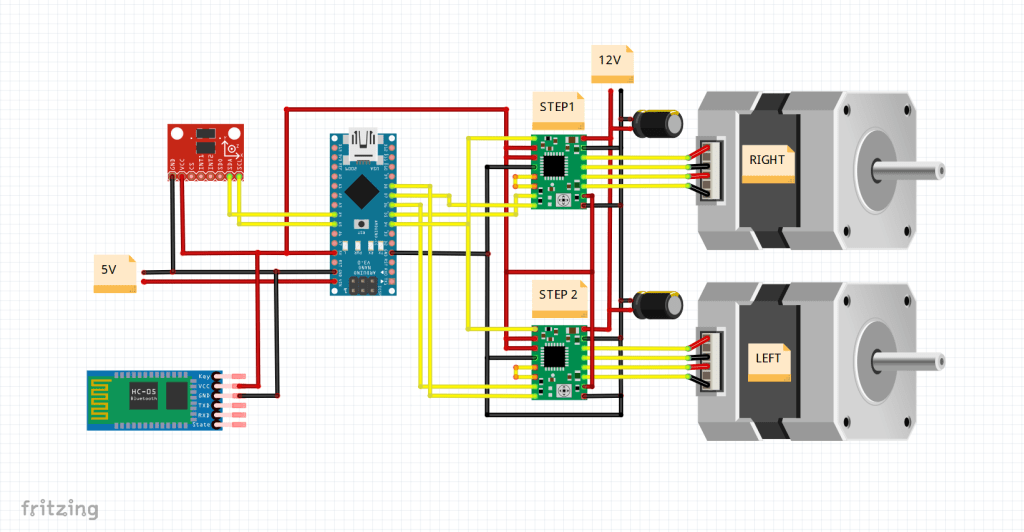
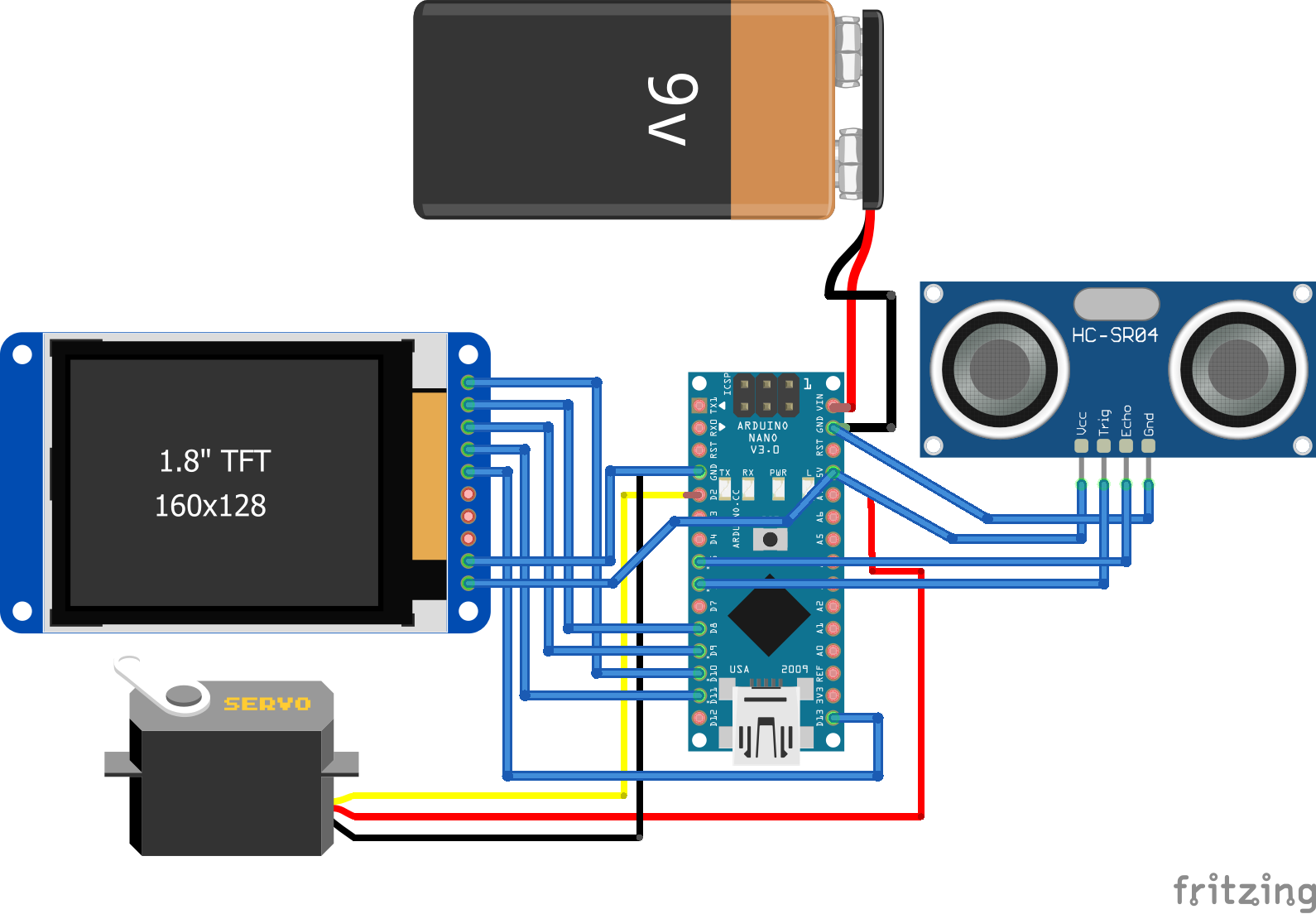
以下是本项目的硬件连线图,可见并不难。另外视频中采用的是额外PCB打板的方式,如果您觉得没有必要,直接进行连接并固定在3D打印外壳即可。
最后,我们为您在下面列出了迷你超声波雷达项目中所需要的电子元器件的清单。
-
-
- Arduino nano
- HC-SR04超声波传感器
- SG90伺服
- 1.8″ ST7735液晶屏
-
开源创客项目原文地址:
https://www.hackster.io/user421848217/mini-radar-with-arduino-7309ca
资源下载链接: