
这是一款可以通过智能手机使用蓝牙控制的自平衡机器人。
对于自平衡机器人来说,网上有很多设计资源,我们太极创客给大家介绍这一款自平衡机器人是因为它的所有材料都很容易获取到。(不像很多网上类似的机器人都需要购买特殊框架甚至需要3D打印才可以。)
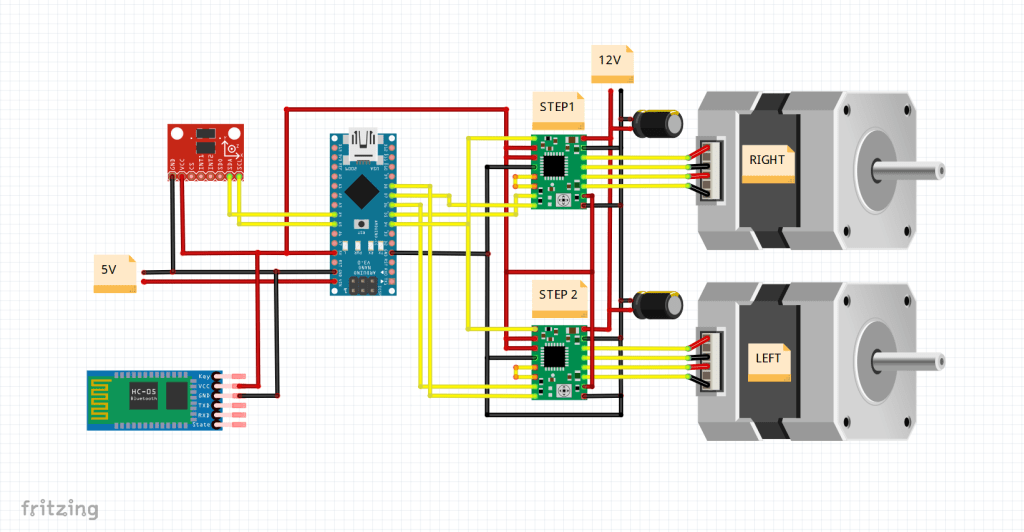
首先这款自平衡机器人使用了Arduino控制器,这对于很多朋友来说更容易操作。
其次它的框架使用的材料为丝杆还有洞洞板亚克力板等,简单有效!当然,你如果不喜欢它的设计,自己修改也是完全可以的。
机器人的电机是最常见的Nema步进电机配合三轴加速计。这些硬件对于朋友们来说要想找到还是很容易的。
当然,和我们给您介绍的其它项目一样它也是完全免费开源的。以下是这款Arduino自平衡机器人的详细制作资料以及源代码。
源代码:
百度网盘下载:https://pan.baidu.com/s/1Hy-8_Kt1HYqZX3SyvKqBAg
GitHub:https://github.com/mahowik/BalancingWii
材料清单:
2 x NEMA 17 步进电机
2 x A4988 电机驱动模块
1 x Arduino Nano开发板
1 x Lipo 电池
1 x HC-05 蓝牙模块
1 x GY-521 三轴加速计
1 x 电路洞洞板
2 x 亚克力平板(也可使用其它材质平板代替)
2 x 10cm 车轮
4 x M5 丝杆
2 x 90度不锈钢角码或Nema电机支架
螺栓螺母
本项目制作英文原始页面:
http://rztronics.com/build-self-balancing-robot-using-arduino-smartphone-control/