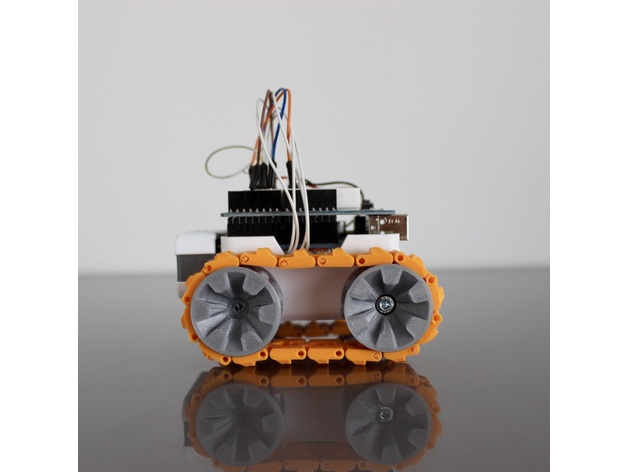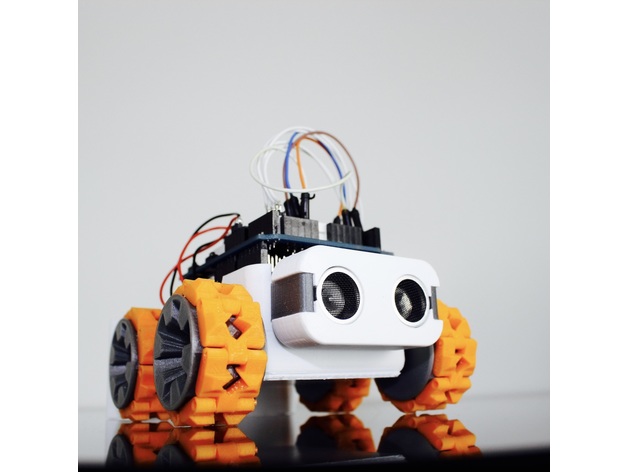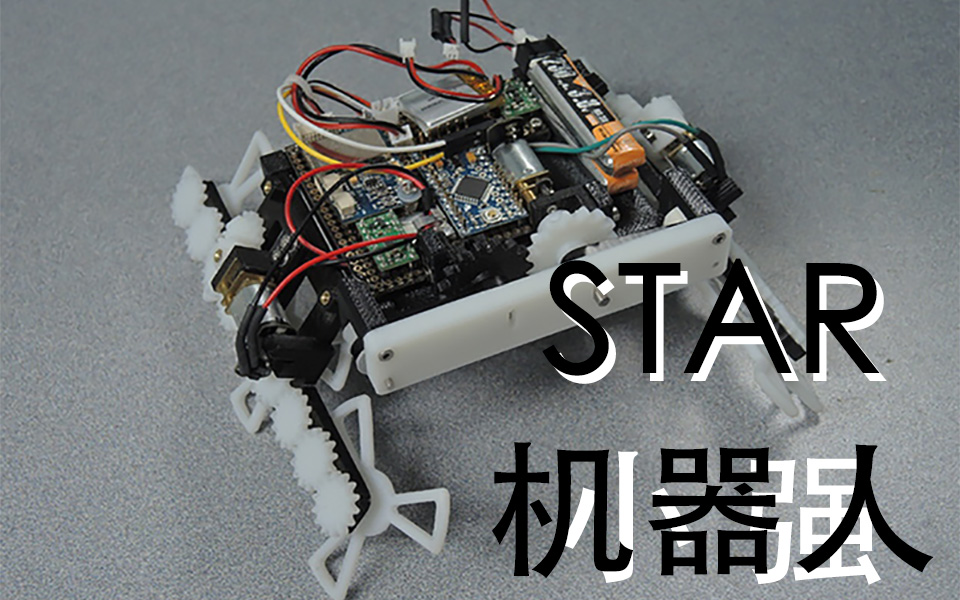
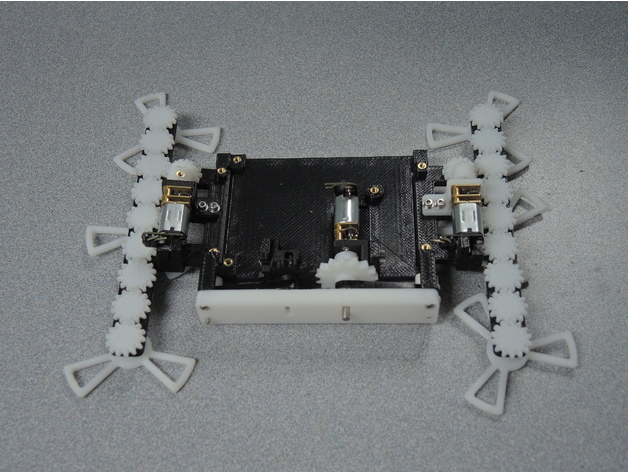
STAR的原始设计来自于加州大学伯克利分校的Biomimetic Millisystems Lab (仿生微系统实验室)。我们在为您寻找有趣的机器人项目时,无意中在油管看到了一个很棒的小哥(油管ID:Potent Printables)根据这家实验室发表的论文DIY了这款STAR机器人。
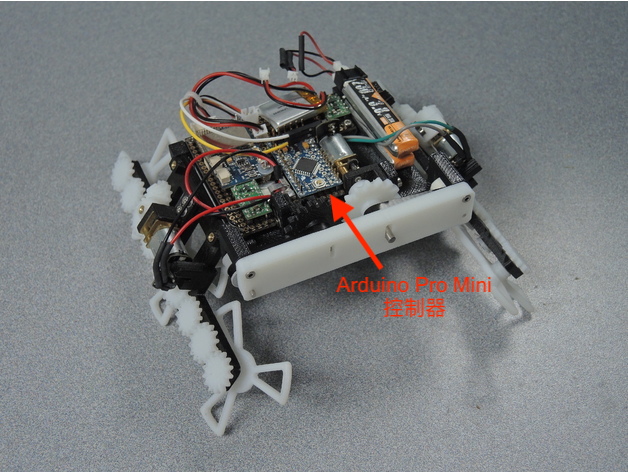
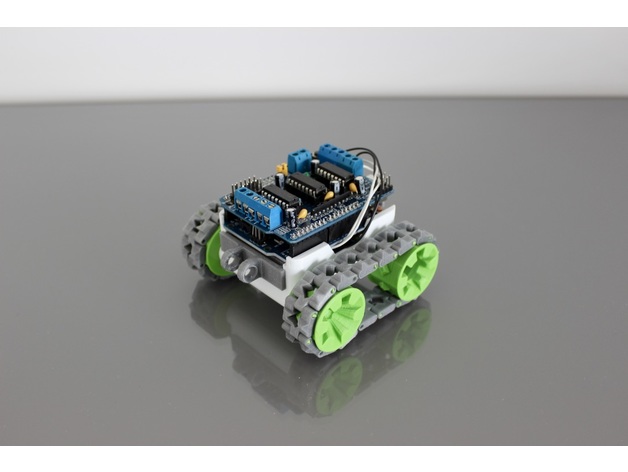
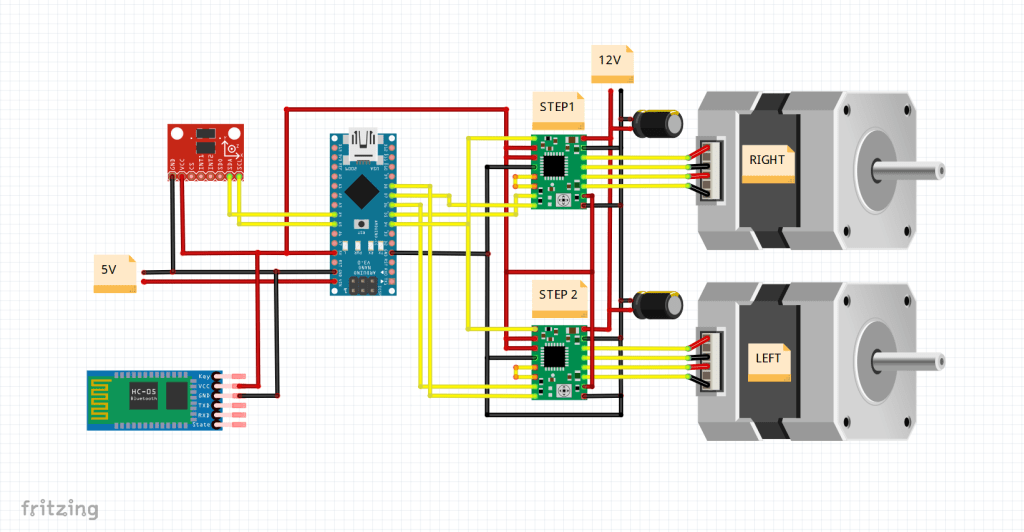
STAR的核心控制器是Arduno Pro Mini。它几乎是Arduino家族中最小的一款开发板。事实上,它比Arduino Nano还要小一圈。正是因为追求迷你的身材,Arduino开发者将这款开发板的USB接口去掉了,所以想要对这款开发板上传程序,需要额外使用USB转TTL模块才行。
STAR的核心控制器是Arduno Pro Mini。它几乎是Arduino家族中最小的一款开发板。事实上,它比Arduino Nano还要小一圈。正是因为追求迷你的身材,Arduino开发者将这款开发板的USB借口去掉了,所以想要对这款开发板上传程序,需要额外使用USB转TTL模块才行。
初看STAR感觉它和小强很像,于是我们根据Potent Printables小哥留下的线索找到了设计STAR的实验室,果然在这家实验室里看到了很多以昆虫为原型的仿生机器人项目。
该实验室网站:https://people.eecs.berkeley.edu/~ronf/Biomimetics.html
出于好奇,我们又在网上找了找关于昆虫仿生为工程设计所作出的贡献,然后发现了下面这些有趣的资料。
仿蜂巢轮胎

Resilient技术公司和威斯康星州大学麦迪逊分校聚合体工程学中心的开发人员设计了模仿蜂巢结构的轮胎。这种轮胎具备较高的承重能力,可抵御临时爆炸装置袭击并且能够在遇袭后仍以每小时50英里(约合每小时80公里)的速度行驶。
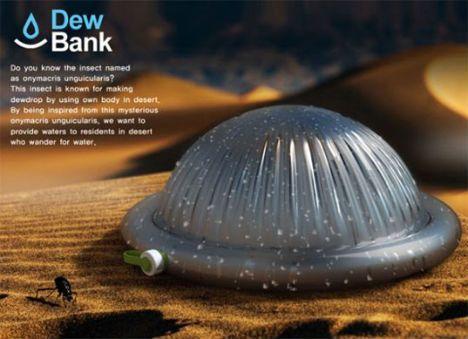
灵感来自甲虫的水壶
在世界上一些严重缺水的地区,只有富有革新性的发明创造才能真正确保饮用水的洁净与安全。设计师帕克·基特所设计的“露水库”水壶模拟了甲虫雾中取水的方式,水壶背部的脊状结构能够收集露水。这款水壶采用不锈钢圆顶造型,早晨时的温度低于空气,所形成的露水会滑落至一个收集道,收集起来的水就可以供人饮用了。
好了,还是言归正传。以下是我们为您整理的STAR机器人制作资料。
制作材料清单:https://pan.baidu.com/s/1S0yq2eOliHU5PwT-MqC6uA
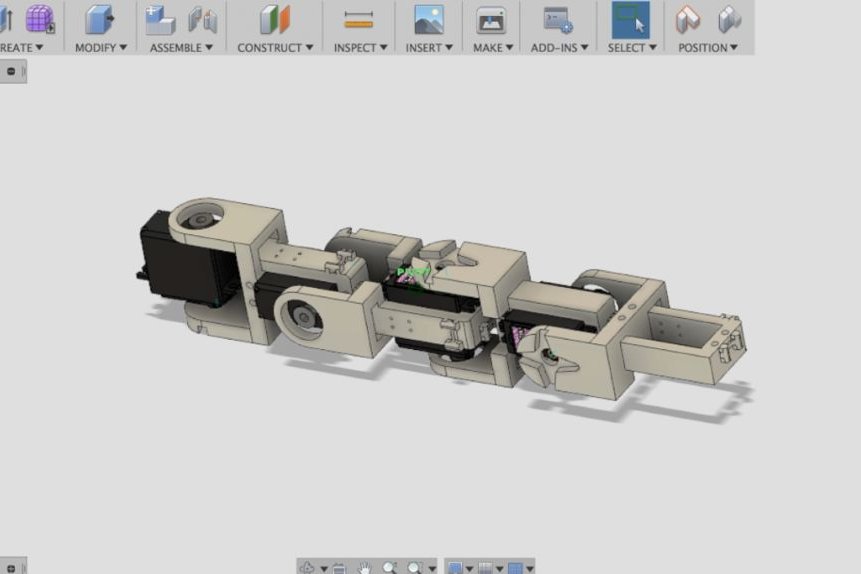
3D打印源文件(STL格式):https://pan.baidu.com/s/1Y9jiLBN_LFS56Bu7ffDi_g
Arduino代码以及组装说明:https://pan.baidu.com/s/1f2wLFE9TEr2eb9_snuuo9g