继上一期推出了三款免费开源三轴机械臂之后,很多小伙伴们说这些机械臂都做过了,有没有更猛的!
OK!本期我们要向大家介绍的是4款各具特色的六轴机械臂,依旧免费、依旧开源、依旧能在太极创客下载到全部资料!
之所以选择六轴,是因为这是一种更加灵活的组合,在此基础上能完成高效的动作。通过360度旋转、多维度伸缩,它打破了机械的局限。即使是固定在桌面上,成功完成远距离的复杂动作也不成问题。
1 Small Robot Arm 机械臂
 small-robot-arm-机械臂
small-robot-arm-机械臂
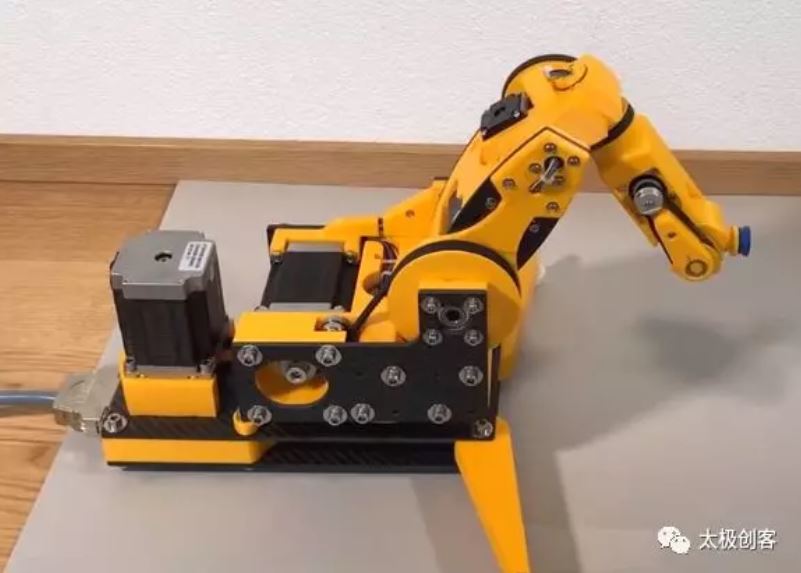
SmallRobotArm 具有出色的性能,可与一些工业机械臂相媲美!
1.机器人的精度约为0.1mm。
2.最高速度约为5.9厘米/秒。
3.最大有效载荷约为150-200克。
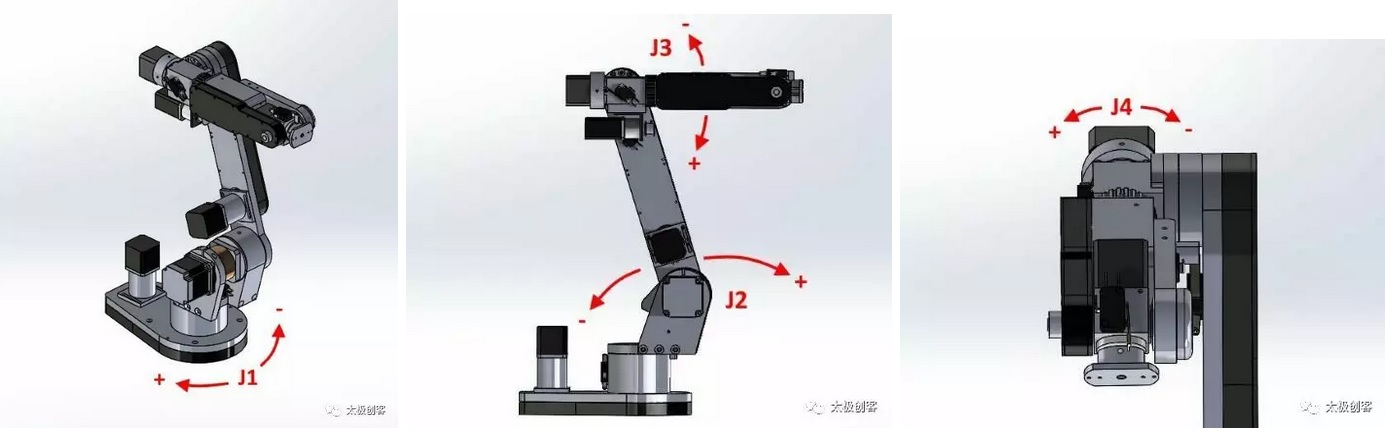
 Small-Robot-Arm机械臂
Small-Robot-Arm机械臂
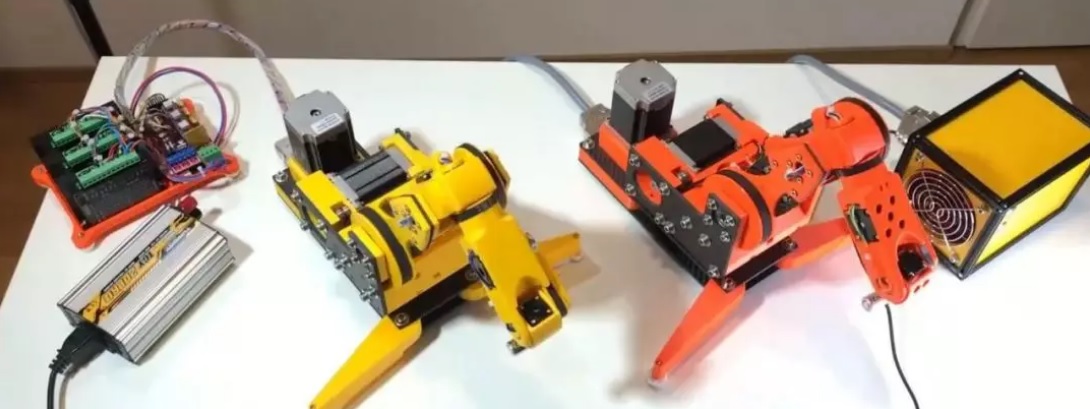
执行机构:由2个57步进电机,1个42步进电机,2个28步进电机和1个20步进电机组成,传动方式采用同步带传动,具有更高的精度。
主控板:Arduino Mega2560+RAMPS1.4,很多创客朋友们都熟悉的配置哦
驱动器:57步进电机与42步进电机由TB6560驱动,28步进电机和20步进电机由A4988驱动。
 Small-Robot-Arm机械臂
Small-Robot-Arm机械臂
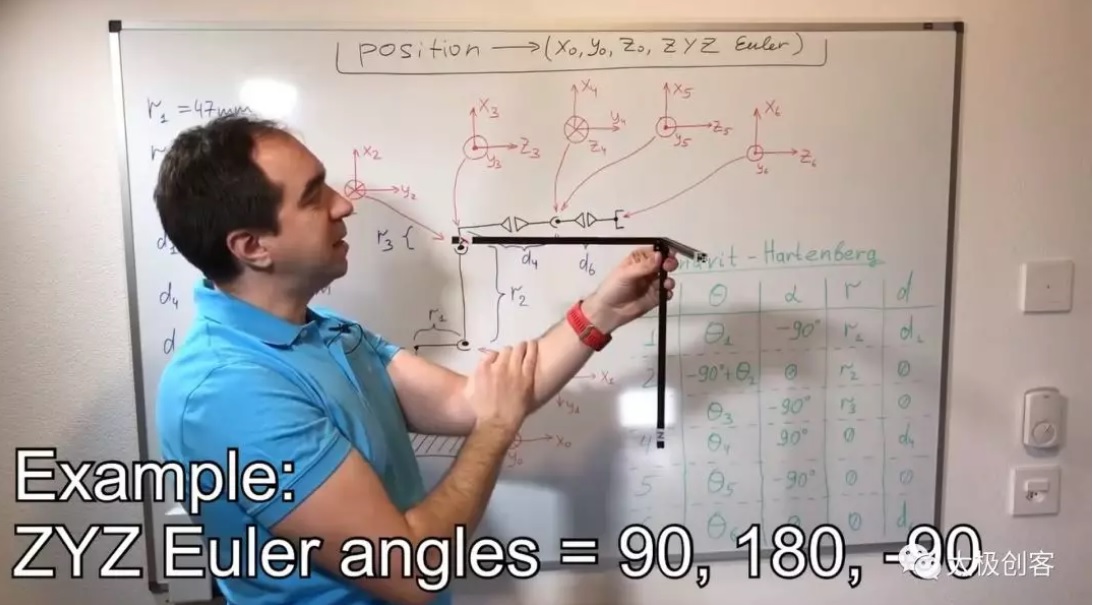
作者对固件里写有的6自由度机械臂的运动学正解和逆解的算法都进行了讲解(可在太极创客下载相关视频讲解),广大创客小伙伴们有福了。此外,该项目作者还开发了用于控制机械臂的手机APP(安卓版)和与其配合的蓝牙版固件,创客们可以用手机连接控制板来操作6自由度机械臂。
Small Robot Arm 机械臂资料下载链接:https://pan.baidu.com/s/1FcXhjypcXKUvZC9-5x2fCg 提取码: 5fs8
2. Niryo One机械臂
 Niryo One机械臂
Niryo One机械臂
法国两个工程师Marc-Henri、Edouard热爱一切开源的产品,他们把熟悉的3D打印和Arduino、RaspberryPi结合,真的把这样一个“六轴”的小型机械手臂NiryoOne制作出来了!
 Niryo One机械臂
Niryo One机械臂
开源的设计对用户更加友好,更多制造者能够参与进来。有条件的创客们能够自己打印组件与NiryoOne搭配使用,或者编写程序让NiryoOne做出高难度动作,让NiryoOne的潜在可能性尽可能地发挥出来。
 Niryo One机械臂
Niryo One机械臂
手臂最大的功效其实是抓取物品,NiryoOne配有几种不同的抓手,对水平和垂直表面物品的抓力都不错。除了简单的张合以外,还有电磁力、抽管等辅助力量。
 NiryoOne机械臂
NiryoOne机械臂
绘画、记事、下厨、3D打印、打孔、实物演示的家务活及工作琐事都能统统丢给它,顺便解放双手、节省下了时间成本。工程师还打算编写更加复杂的程序让它制作利器、变得更加好玩、以及更有交互效果,NiryoOne或许能做更多。
Niryo One机械臂资料下载链接: https://pan.baidu.com/s/19hWkRsBwcx7LoFMXDNarfA
提取码: hfb9
Niryo One机械臂官网:https://niryo.com/
3. Annin Robotics AR2机械臂
 Annin Robotics AR2机械臂
Annin Robotics AR2机械臂
Annin Robotics AR2是一款开源的低成本机器人,任何人都可以自己制作。AR2可以使用铝制部件制造,也可以自行3D打印部件。
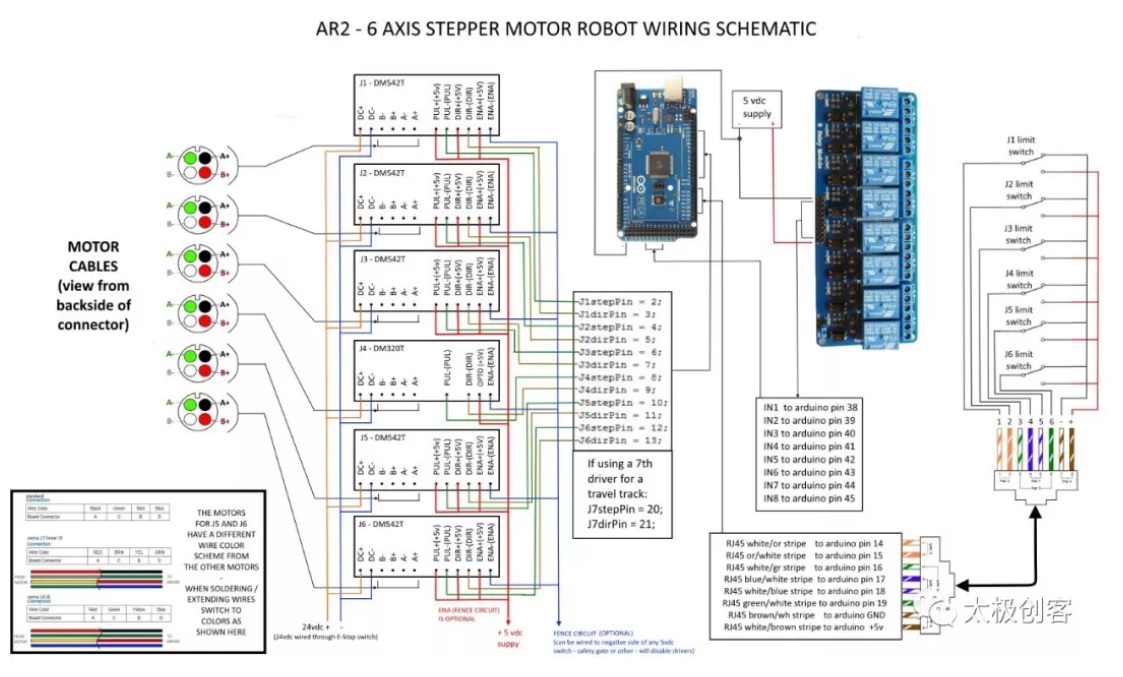 Annin Robotics AR2机械臂
Annin Robotics AR2机械臂
执行机构采用多个高精度行星齿轮减速步进电机,相对于同步带传动来说,成本高了不止一星半点哦。
3D打印文件,操作软件和组装手册可通过以下链接下载。
 Annin Robotics AR2机械臂
Annin Robotics AR2机械臂
AR2的目标是创造一个低成本选项,以便任何人都可以构建一个6轴机器人,用于娱乐,教育或小型生产操作。
前方高能!相对于其他6轴机械臂来说,制作AR2机械臂的是很大的工程,对时间、精力、钱包、动手能力都是巨大的挑战哦。小伙伴们制作前可要考虑好了。
Annin Robotics AR2机械臂资料 下载链接: https://pan.baidu.com/s/112aRXIikfuJGO0rCr9v_OQ
提取码: 7yqi
Annin Robotics AR2机械臂官网:https://www.anninrobotics.com/
4. BCN3D MOVEO 机械臂
 BCN3D MOVEO 机械臂
BCN3D MOVEO 机械臂
巴塞罗那科技组织BCN3D Technologies开发出一款开源的5轴机器人臂Moveo,该设备由一个Arduino微控制器驱动,能以较低的成本复制。
BCN3D是Fundació CIM的一个项目,其宗旨是改变世界的制造方式。
 BCN3D-Moveo-机械臂
BCN3D-Moveo-机械臂
Moveo的一个重要部分是它的开源性质,与以往所有的项目一样,您可以在太极创客下载到其所有资料或找到此开源项目地址。
创客们可以获得Moveo的材料单、STL文件、可修改三维模型文件等信息,然后在家或在教室建造、定制自己的Moveo。
BCN3D MOVEO 机械臂资料下载链接: https://pan.baidu.com/s/1tu-jdso0nIq7mkJ1hPQ6aA
提取码: dryc
BCN3D MOVEO 机械臂官网:https://www.bcn3dtechnologies.com/en/bcn3d-moveo-the-future-of-learning/
<-返回太极创客博客目录