制作Arduino项目可以给您带来很大的满足感,但很多时候初学者不知道从哪里开始。开始项目之前需要考虑很多事情,如果您没有制作的经验,将会很困惑。那么今天就来看看我们可爱的群友@圣骑土 做的麦轮小车吧!
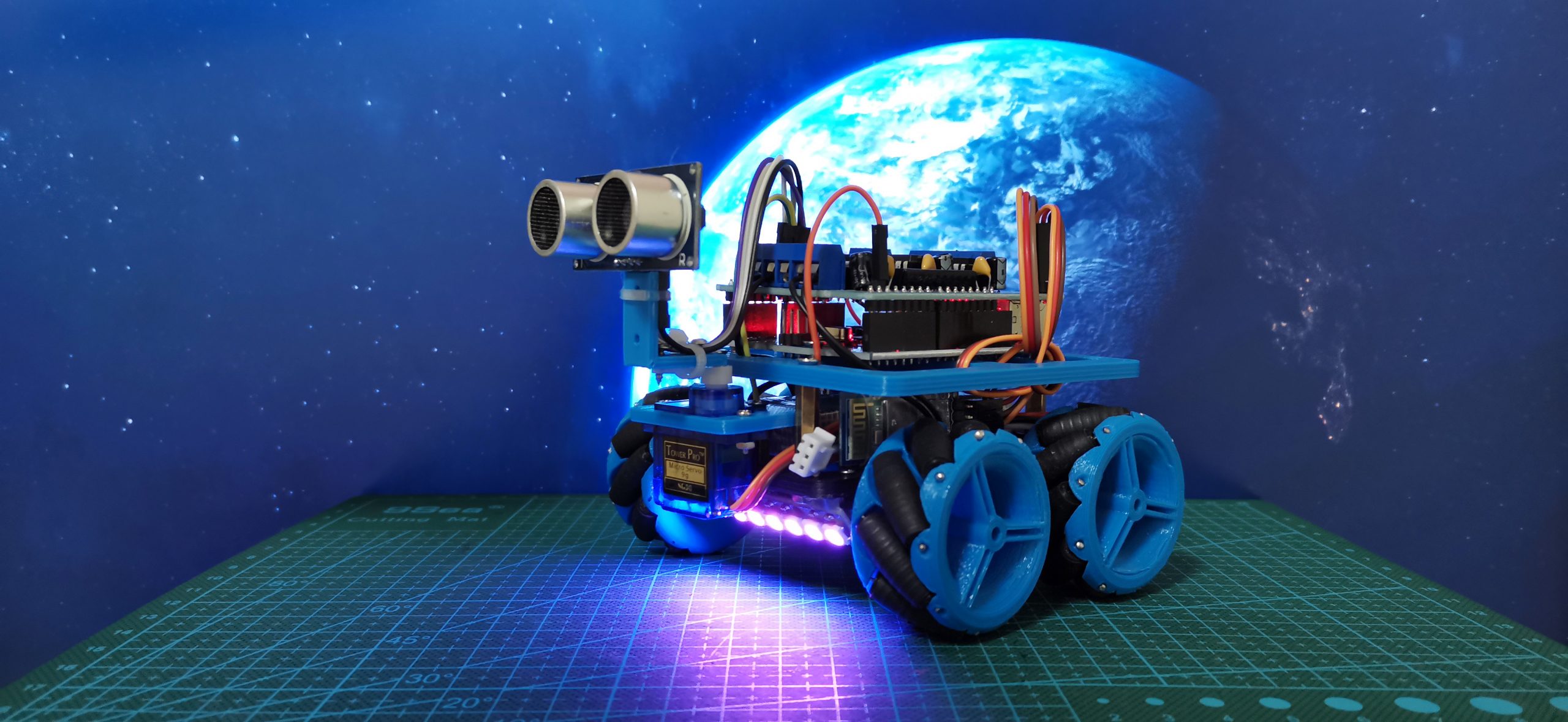
驭风麦轮小车 驭风麦轮小车 演示部分 哔哩哔哩 | 驭风麦轮小车
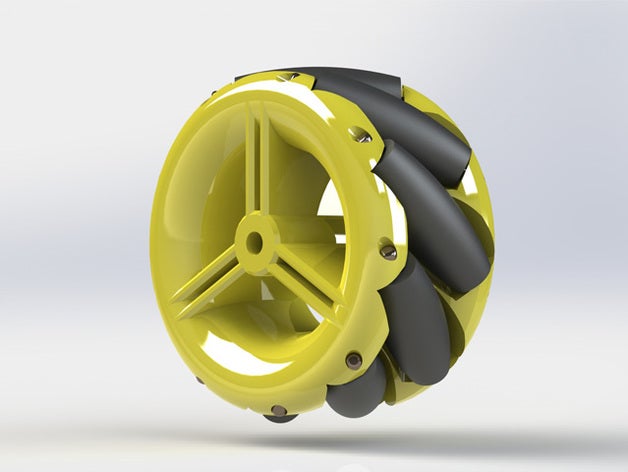
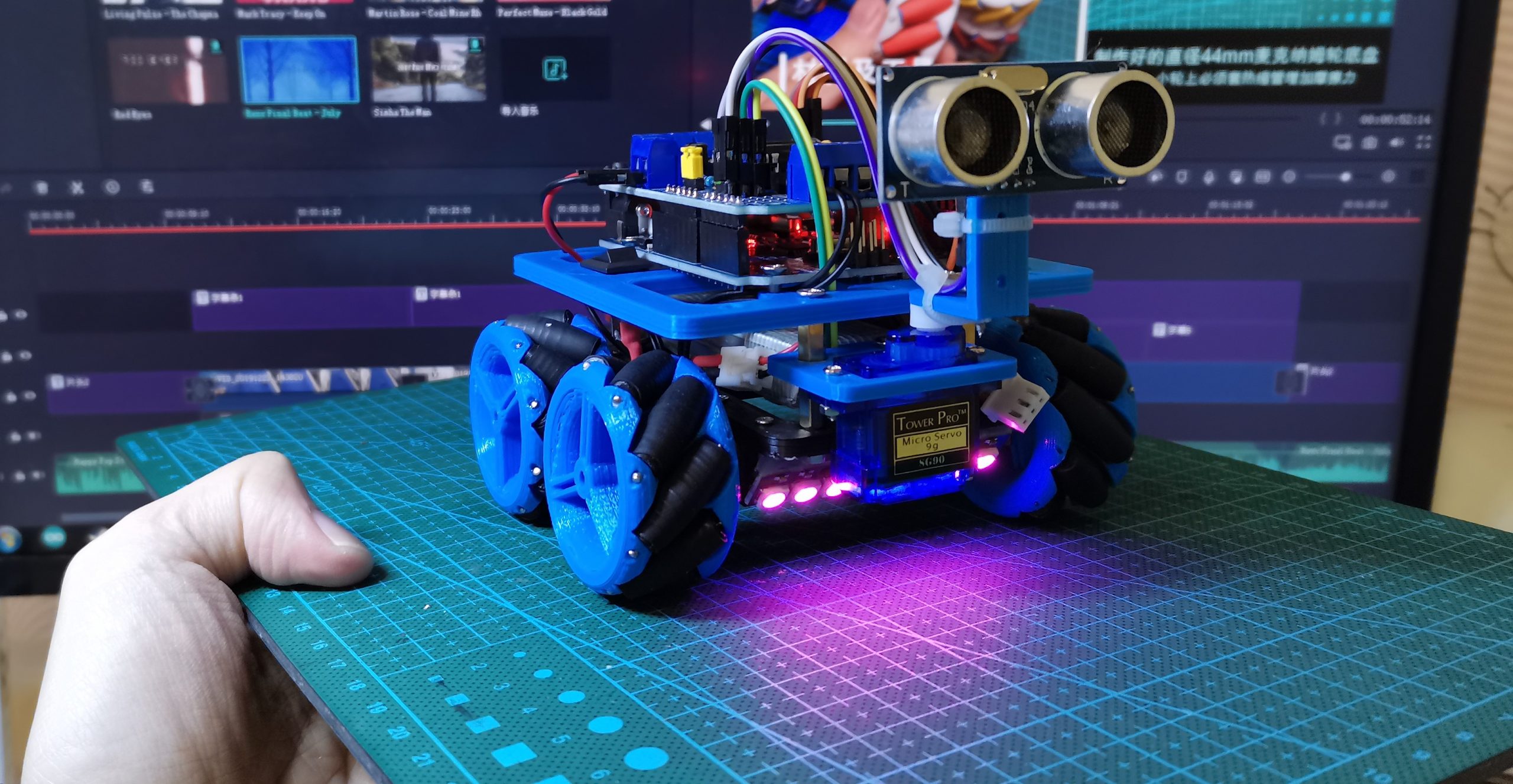
麦克纳姆轮 相信很多小伙伴都想拥有一款属于自己的麦克纳姆轮小车,但苦于目前市面上的麦轮太贵。别担心,机智与无私齐飞的群友为大家分享提供了一个使用3D打印进行制造的炫酷解决方案,并且他在群内向广大创客朋友们开源了自己这款有趣的驭风麦轮小车。
驭风麦轮小车 您可以按着他提供的开源资料制作自己的麦轮小车呢,另外这位优秀的小伙伴还在咸鱼配好了硬件呢,有意向的话也可以跟他联系哦。
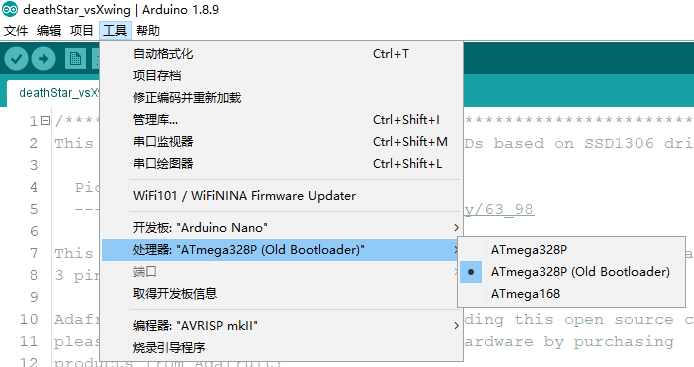
麦轮 小车 源码 可以看到控制程序源码的注释对于新手来说相当友好,相信在您看了太极创客零基础入门教学视频以后,您可以轻松的看懂并学习他的编程控制思路,也可以和他一起进行后续的开发,一起感受开源的魅力。
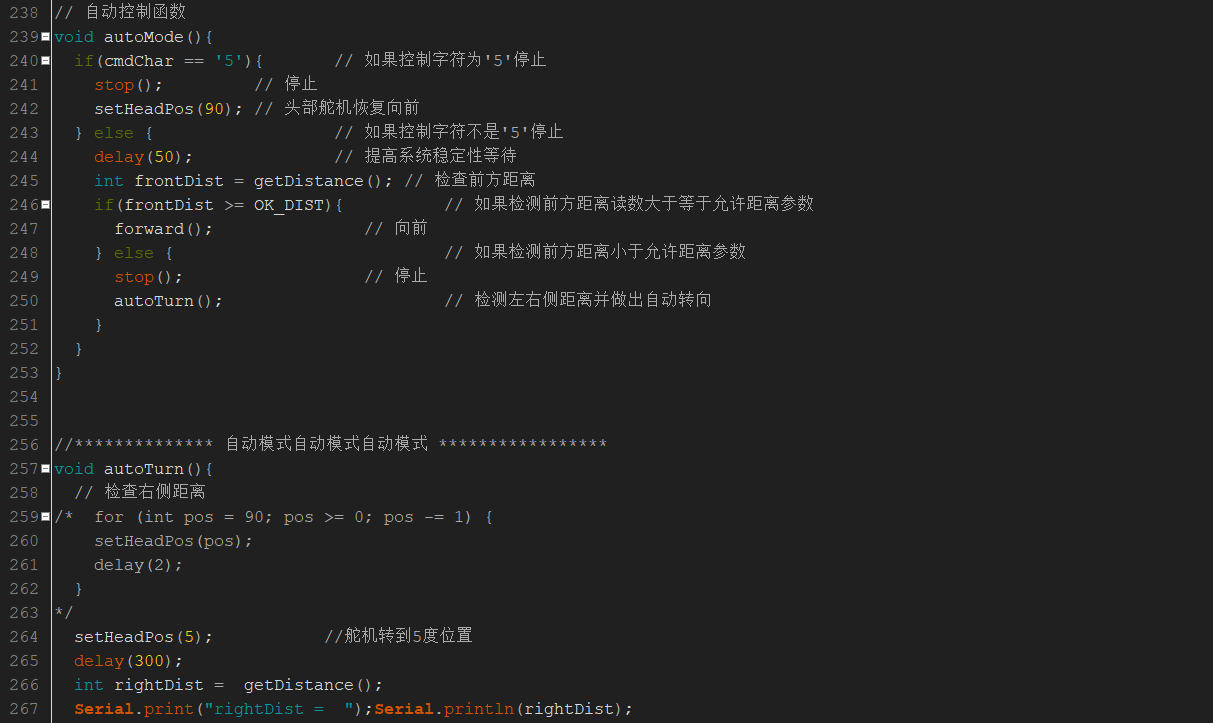
麦轮 小车 部分源码 程序内使用到的FastLED 库和AFMotor 库您都可以在太极创客网站找到视频学习教程和下载地址,当然,这也包括怎么为Arduino IDE安装添加库 的几种方法。
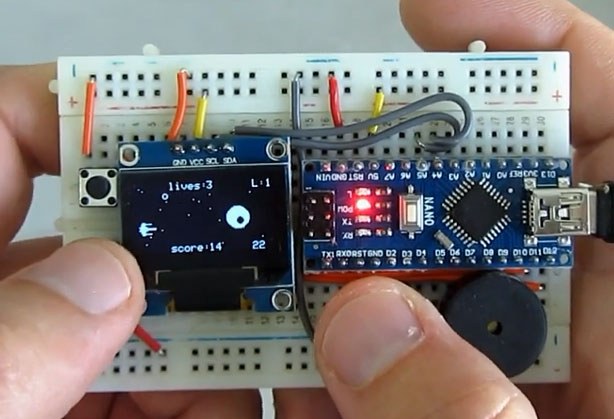
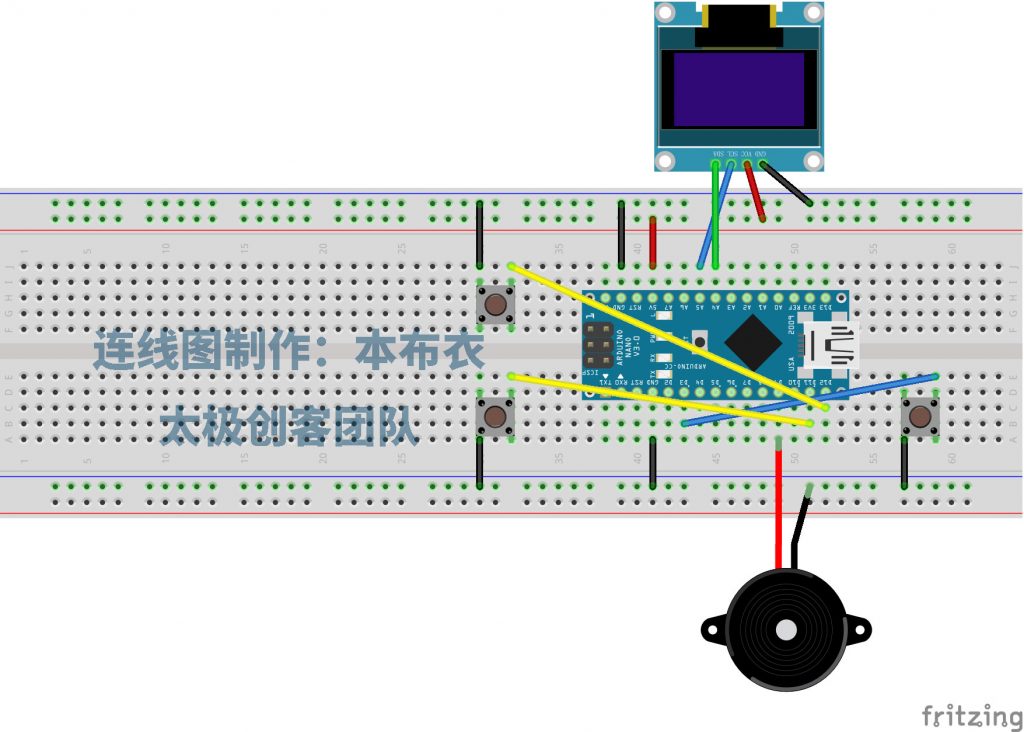
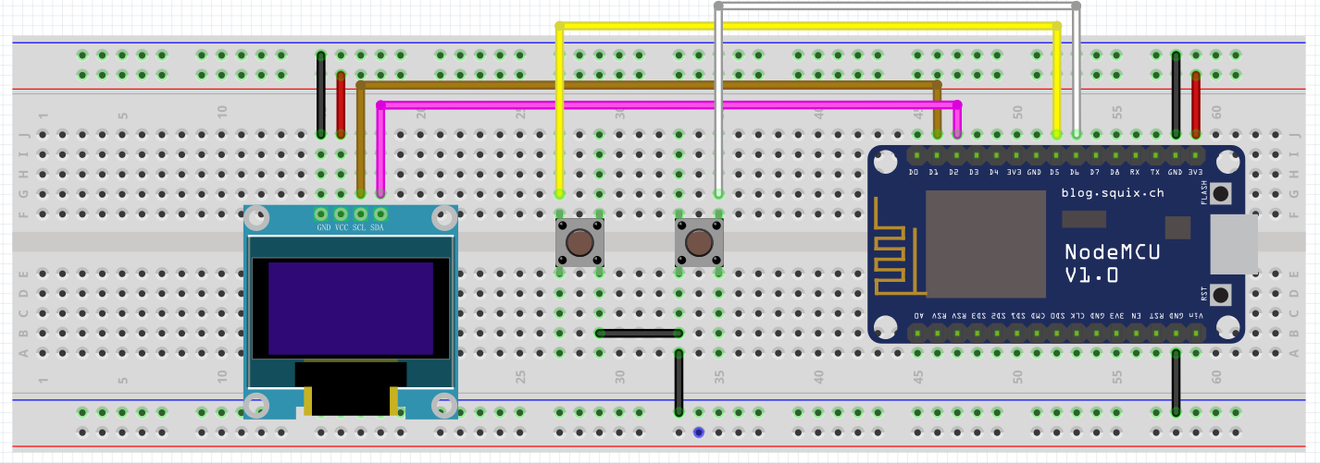
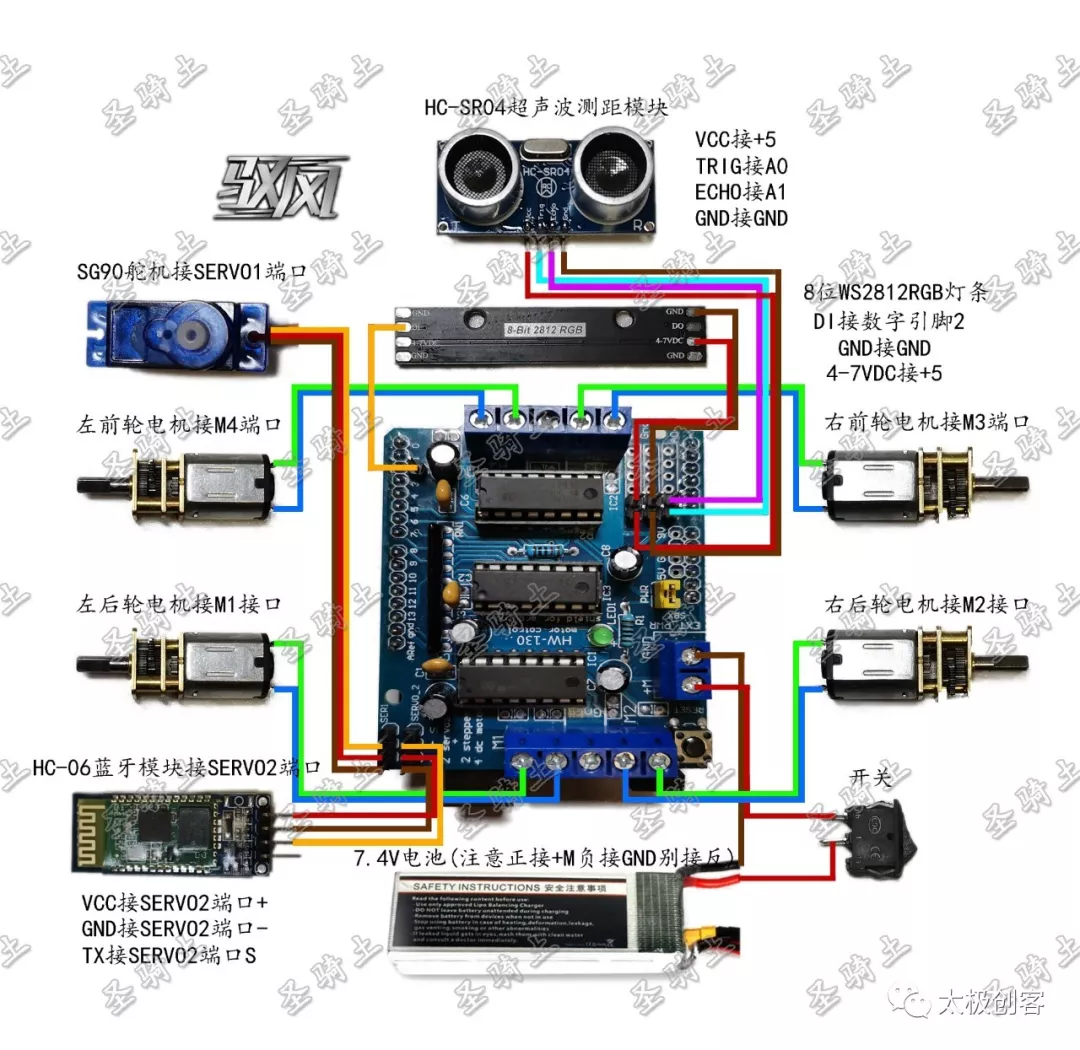
电路连线图 据悉手机端控制APP使用的是太极创客学习交流群群友上传的可定制蓝牙控制APP,这里作者在资源包里提供了他的配置文件哦,安装配置即可使用,您也可以在此基础上进行二次开发并与大家交流学习哦!
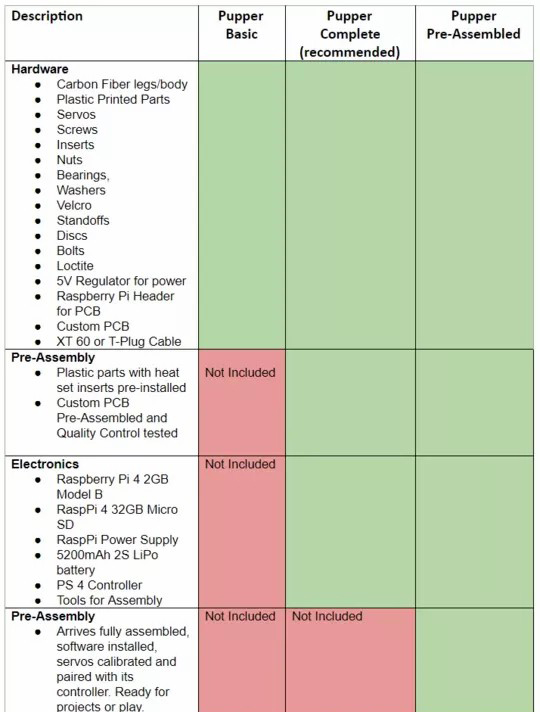
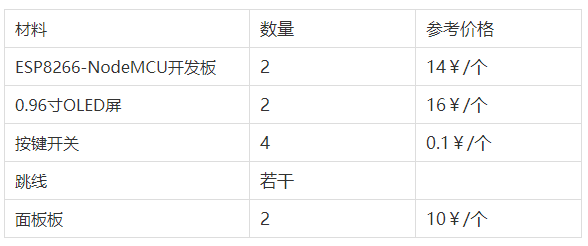
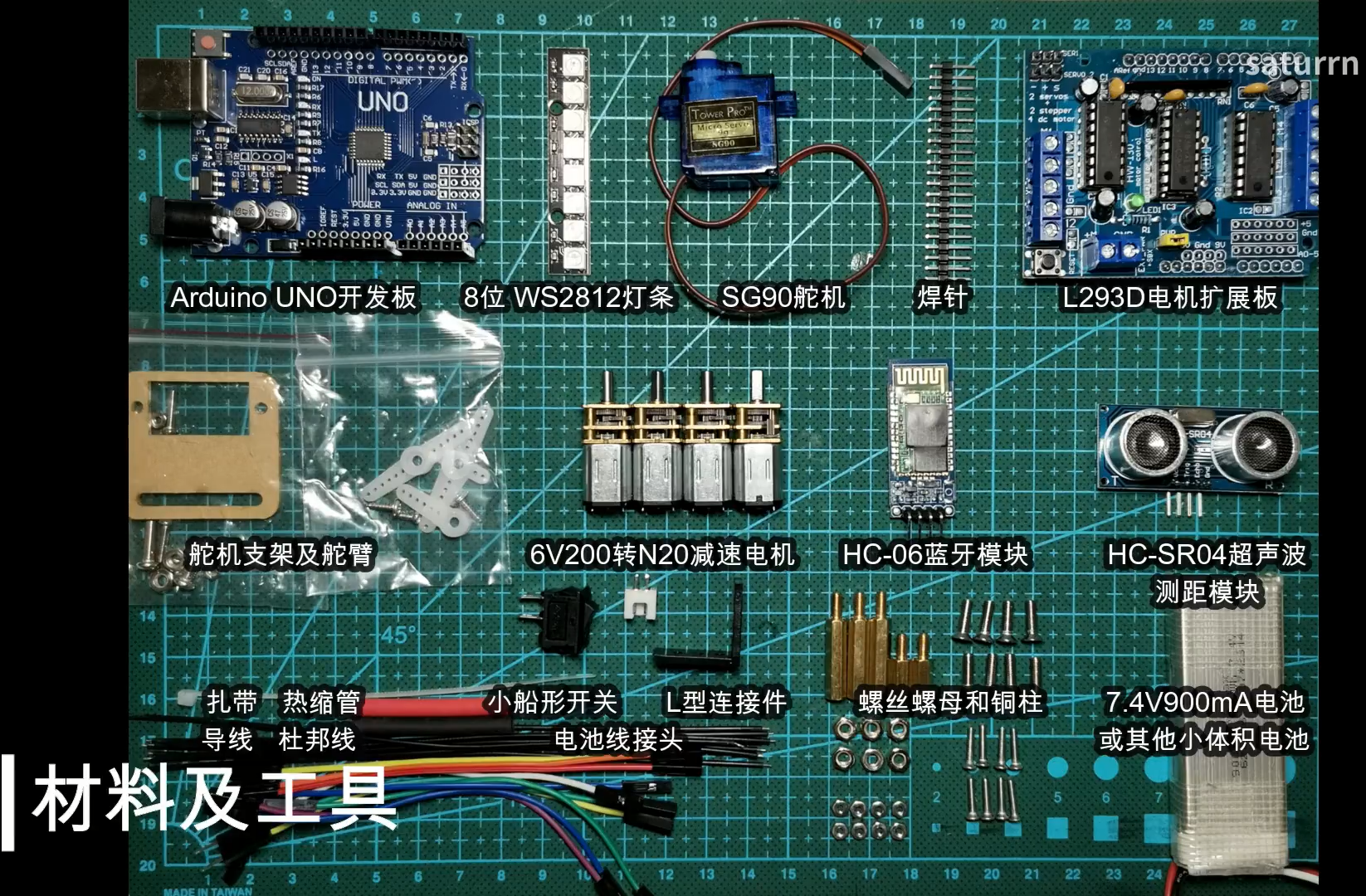
麦轮小车BOM 接下来看看麦轮小车的制作清单吧!
材料清单:
– 底盘及麦轮(含电机固定件)+舵机支架+L型支架(超声波) 麦轮若自己制作,小轮上需要套8mm直径热缩管,不然严重打滑
– M2螺丝螺母(电机固定M2x10共8个+8个M2螺母)
– 排针2+2+2+1(焊在L293D扩展板上)
所使用的工具:
相信看到这些常见的模块您也按捺不住想要制作自己的麦轮小车了呢!
https://gitee.com/zhu_hao_tao/wind_car
与太乐一号 相似,作者在码云开源了驭风麦轮小车,在这里您不仅可以将驭风麦轮小车这个项目fork到您的码云仓库中进一步开发,还可以把您的感受分享给我们和更多开源社区里的朋友们。