太乐一号智能车正式上线。如需前往太乐一号详细教程页面,请点击以下链接:
http://www.taichi-maker.com/homepage/arduino-tutorial-index/arduino-hardware/#taile1
Arduino,人工智能,物联网的应用、开发和学习资料
太乐一号智能车正式上线。如需前往太乐一号详细教程页面,请点击以下链接:
http://www.taichi-maker.com/homepage/arduino-tutorial-index/arduino-hardware/#taile1
本视频使用esp8266驱动2.8英寸tft屏幕播放
制作这段视频有两个原因
一是向优秀国产动画《哪吒》致敬。
二是向预告我们正在加紧制作的物联网教程
IoT物联网作为前沿科技概念逐渐的在我们的世界里扮演着越来越重要的角色。通过《零基础入门学用物联网》教程,您将学会物联网的基础知识、ESP8266-NodeMCU开发板的硬件知识以及如何使用NodeMCU来学习和使用物联网。
教程中将有专门章节介绍如何使用esp8266驱动屏幕显示
屏幕使用仅是物联网教程的一小部分
教程中将有很多实用的物联网开发知识和项目
制作BOM
– ESP8266控制板
– ILI 9341液晶显示屏幕模块
– 杜邦线
– 3D打印外壳
– microUSB 电源
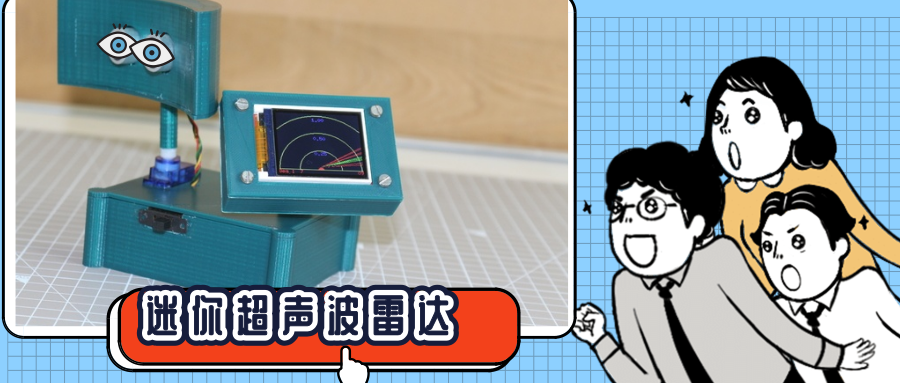
本期创客项目介绍的是一个带显示屏的迷你超声波雷达。
顾名思义,如果雷达检测到前方物体,都将在屏幕上以红线显示。
本期创客项目依旧开源、依旧免费、依旧能在太极创客下载到所有相关资源。
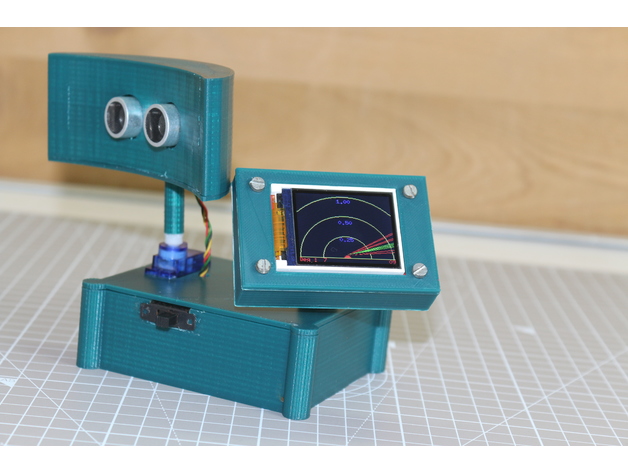
迷你超声波雷达,是一个带液晶显示屏的迷你小型雷达。使用了HC-SRO4超声波传感器(在本站有该模块的详细介绍和教程哦!)进行测距后返回数据通过液晶屏显示,并使用SG90舵机带动超声波模块进行旋转运动从而达到周向扫描。
以下是本项目的硬件连线图,可见并不难。另外视频中采用的是额外PCB打板的方式,如果您觉得没有必要,直接进行连接并固定在3D打印外壳即可。
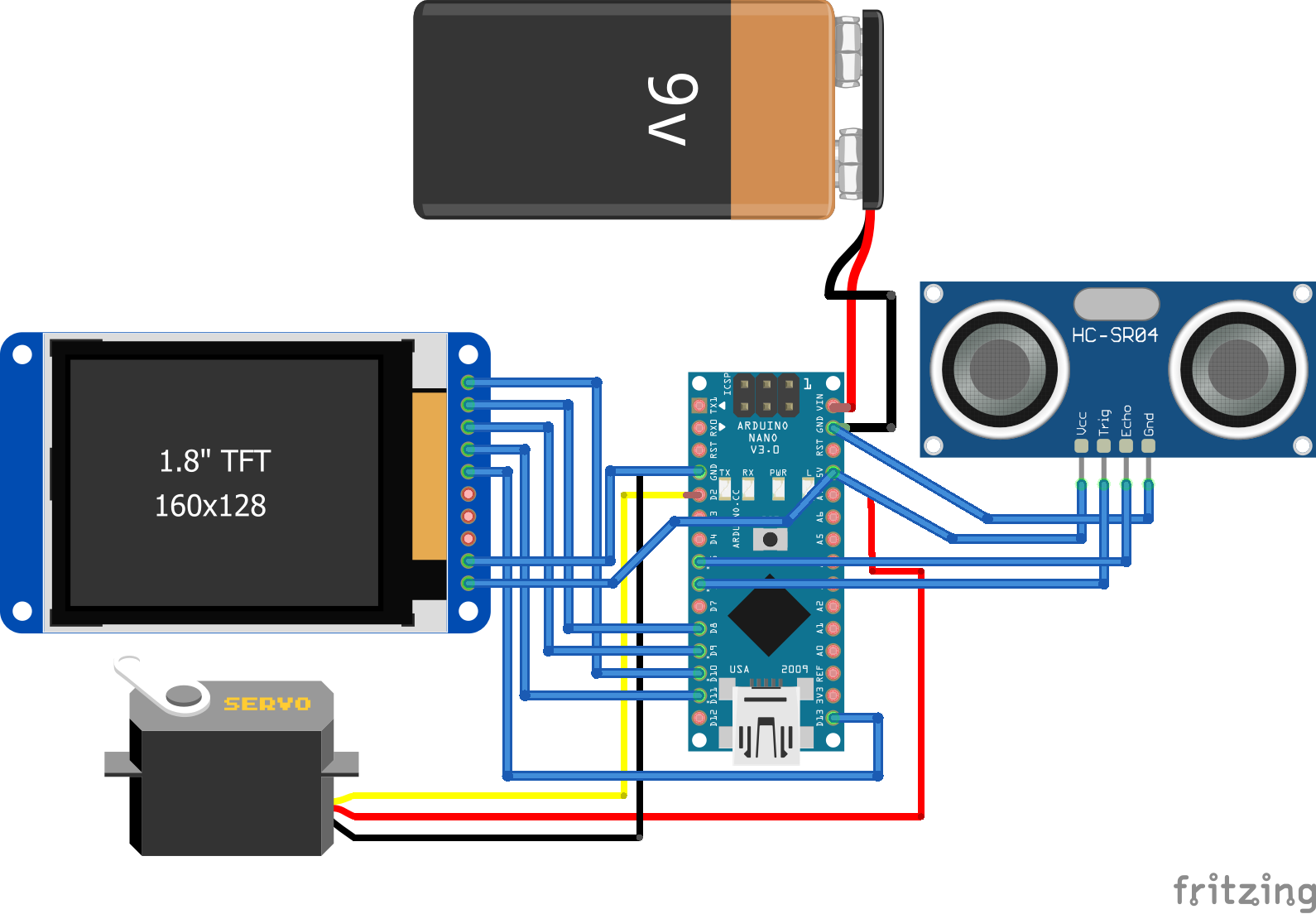
最后,我们为您在下面列出了迷你超声波雷达项目中所需要的电子元器件的清单。
开源创客项目原文地址:
https://www.hackster.io/user421848217/mini-radar-with-arduino-7309ca
资源下载链接:

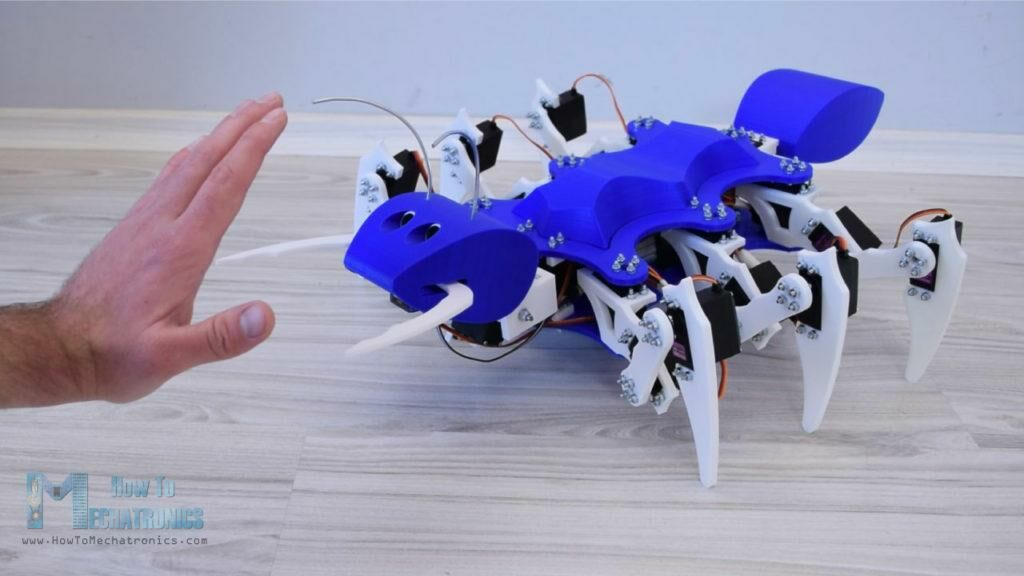
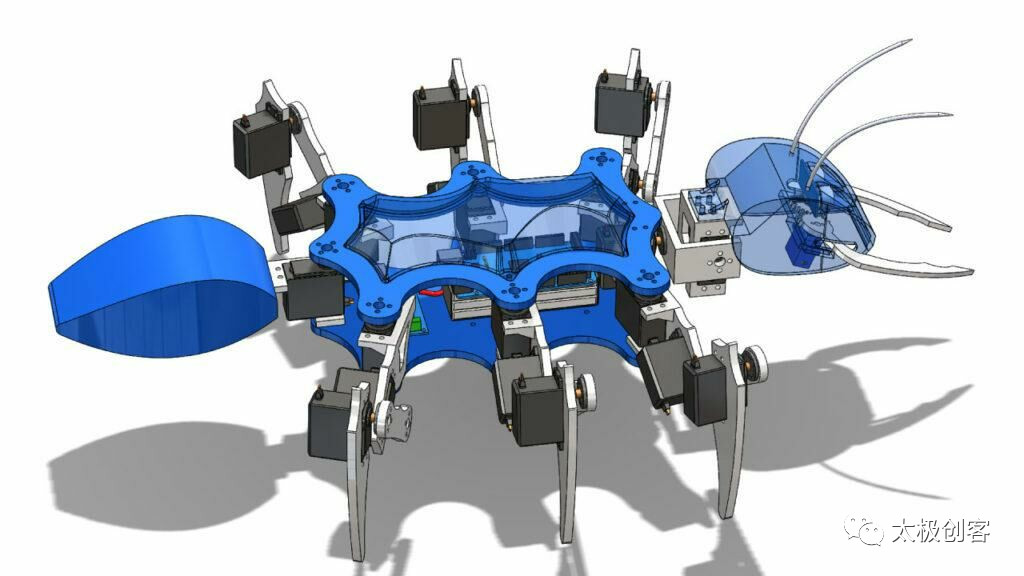

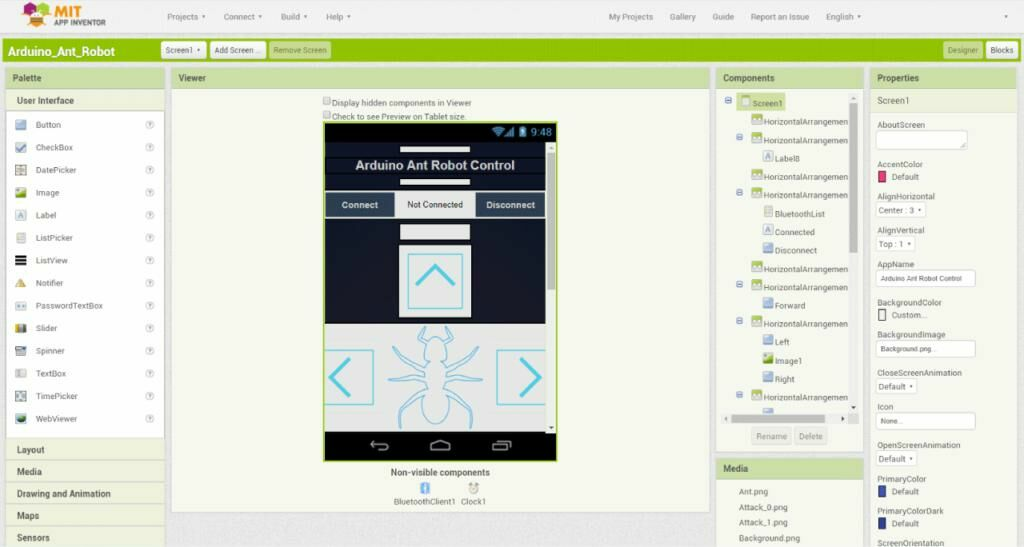
这个项目所有资料都是开源的(三维模型、APP源文件、Arduino源代码),您甚至可以对其进行二次开发,制作属于你自己的小六足,属于你自己的动作组哦!
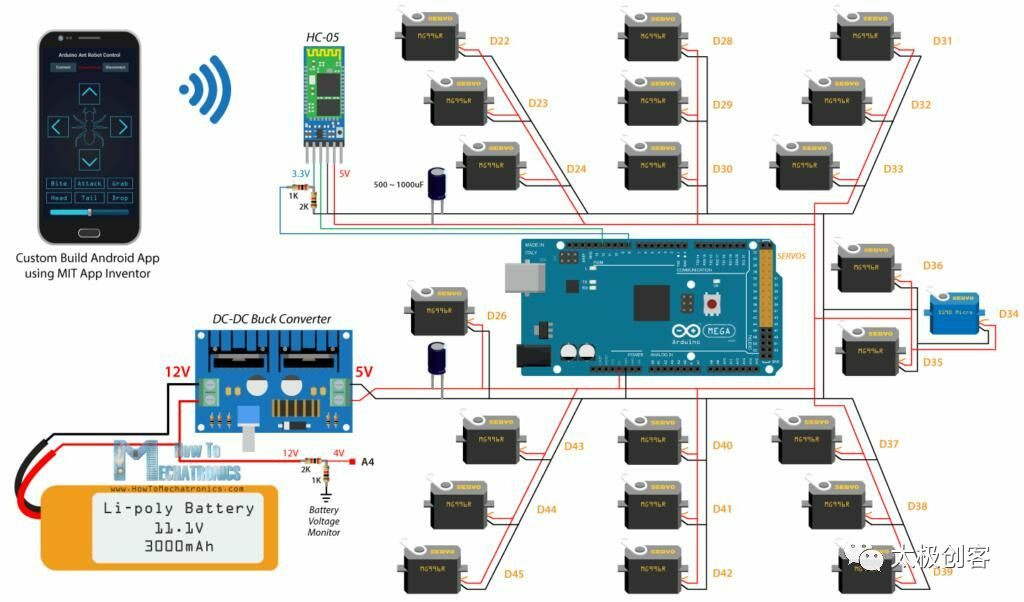
这是该项目的电路图,虽然由于有许多舵机连接,看起来有点复杂,但实际上很简单。除了22个舵机外,我们还需要一个太极创客教程机械臂篇里将到过的HC-05(06)蓝牙模块以及一些电容和电阻。控制器采用的是MEGA2560 ,因为它是唯一可以使用超过12个舵机的Arduino控制板。
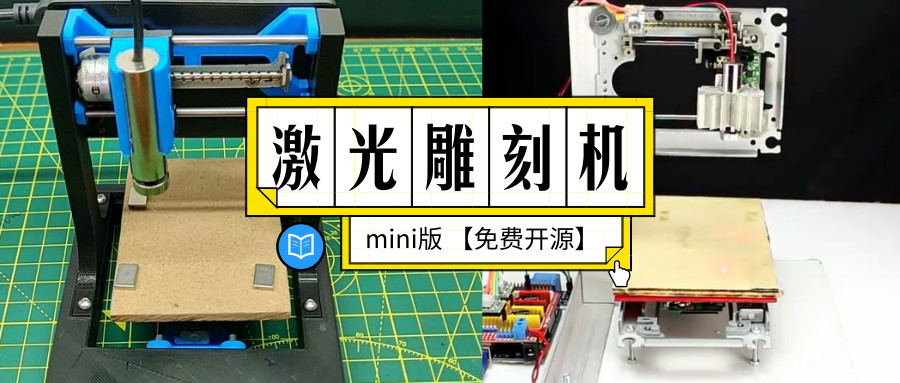
考虑到很多创客小伙伴们是没有3D打印机的,所以本期的创客开源项目将会为大家带来不需要3D打印的光驱激光雕刻机;雨露均沾,包括用3D打印制作的更精准激光雕刻机!
如果你认为我们要给大家带来的只是网络上司空见惯的光驱激光雕刻机制作教程,那你就错了哦!激光雕刻机只是嘘头,我们实际上要给大家重点介绍几款常见好用的基于GRBL固件的上位机软件。
雕刻机制作须知
用光驱制作的mini版激光雕刻机,虽然工作空间略微小了些,但麻雀虽小五脏俱全,无论如何它仍然能有效工作,而且成本非常低,大多数人都有能力制作出一个属于自己的迷你激光雕刻机。
安全提示:激光虽然功率不是很大,但是足以损伤人的眼睛,所以在调试和使用过程中,请千万不要眼睛直视激光,建议自备一副激光眼镜,这点钱一定不能省!
温馨提示:并不是所有的材料都可以雕刻的,一般选用深色的东西比较好,也就是要吸光的东西,如手机壳等,可用牛皮纸进行测试。
制作硬件清单(必需)…
1.DVD光驱 2台
2.激光头 200mW
3.UNO控制板、cnc扩展板、4988驱动模块
4.电源(参考太极创客制作教程)
5.散热风扇
* 铝材架mini激光雕刻机全部资源下载: https://www.lanzous.com/i4nf2yd
* 3D打印的mini激光雕刻机 https://www.lanzous.com/i4nf37c
上位机软件
1 微雕管家
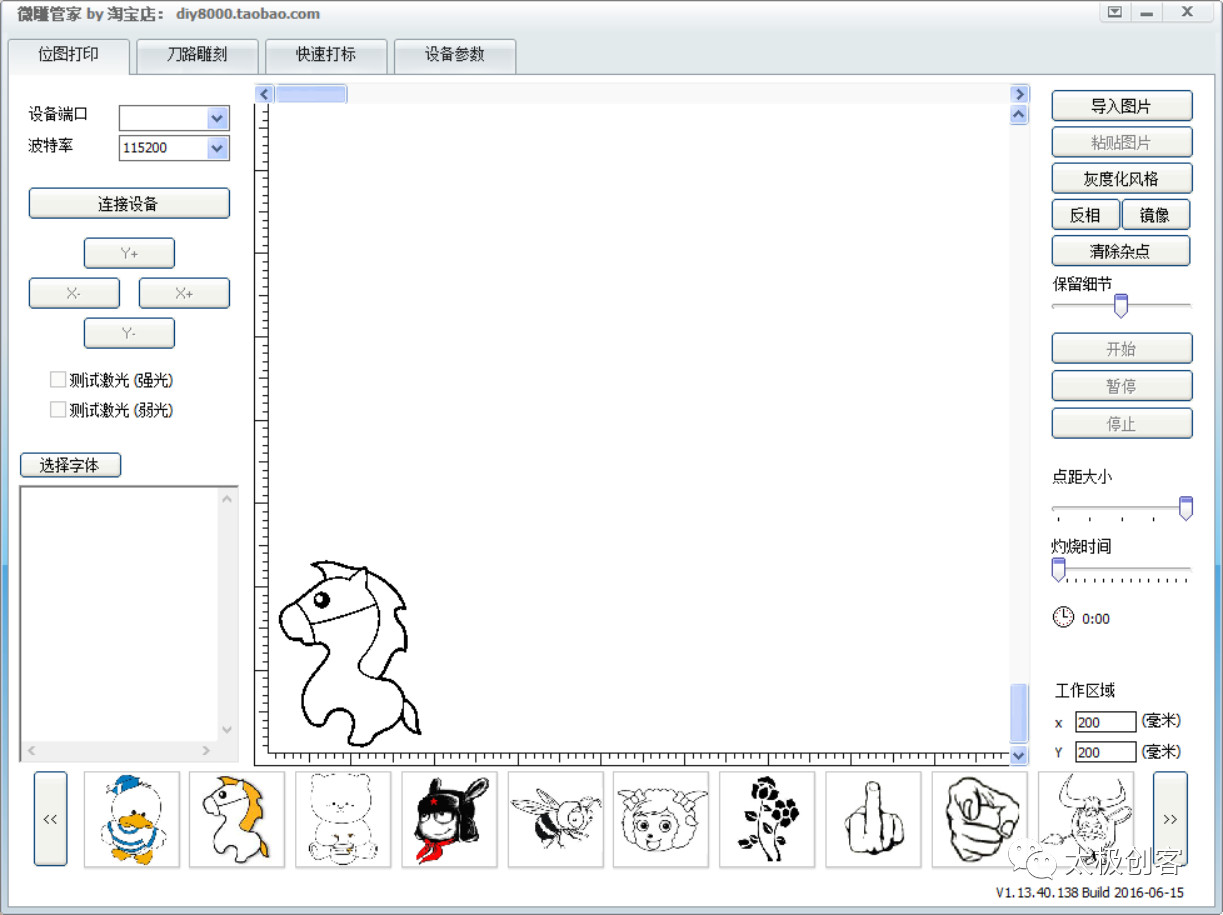
微雕管家软件永远完全免费,无功能限制,支持市面上绝大部分雕刻机产品,也支持DIY激光雕刻机爱好者自行的组装的激光雕刻机,只要软件可以与雕刻机进行通讯,就可以进行操作。

导出的的NC代码可以通过修改文件后缀名的方法改为gcode文件哦!
下载链接:https://www.lanzous.com/i4nfnej
2 奎享雕刻
奎享雕刻是功能强大的软件,使用起来不需要深奥的数控知识,非常适合初学者。任意图片、文字都可以直接切割雕刻,支持照片雕刻,雕刻效果类似激光打印机打印的一样。
下载链接:https://www.lanzous.com/i4nfo9a
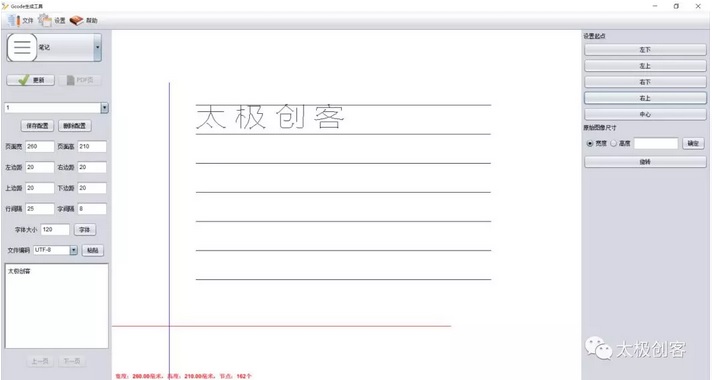
3 鲁班雕刻软件
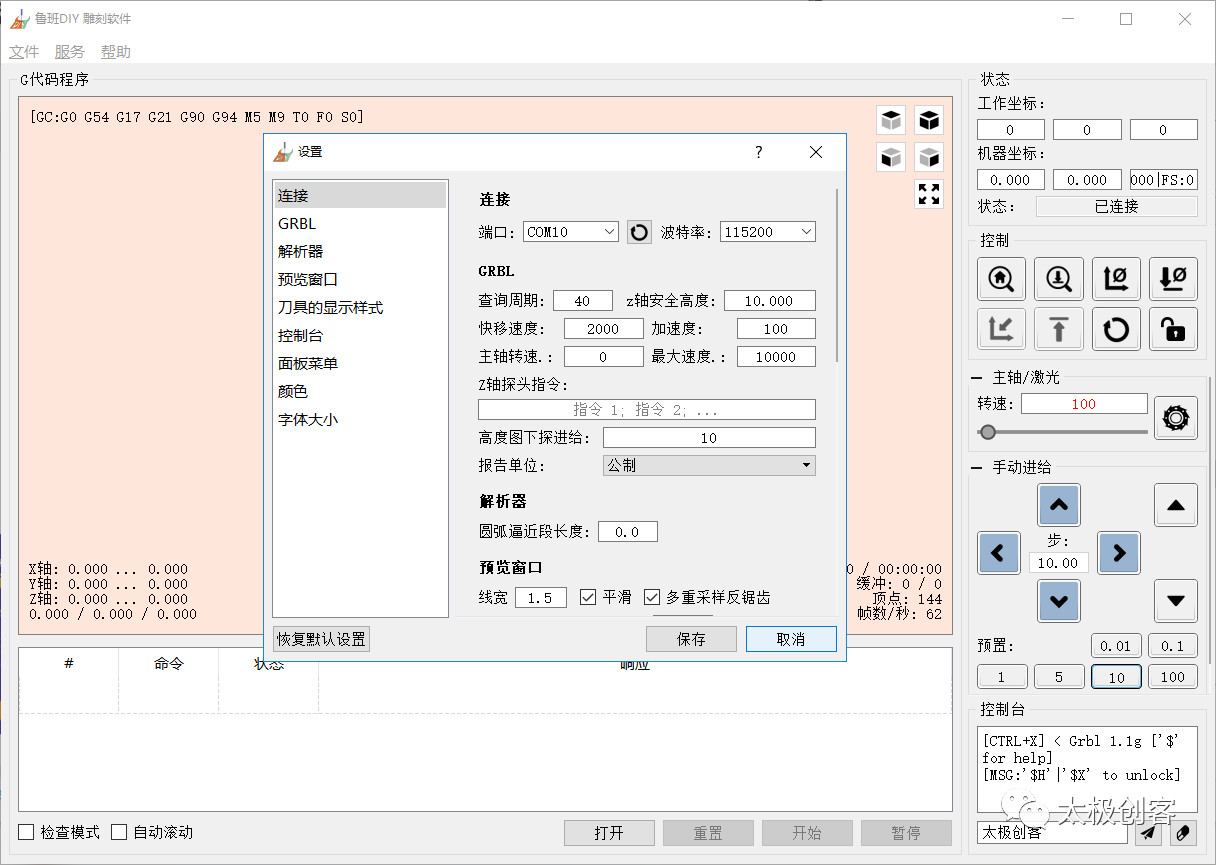
这是一款针对激光雕刻机的操作软件。直接雕刻各种图片效果,各种文字效果,无需生成雕刻代码。是目前中小型激光雕刻机中操作最简便,功能强大的软件。
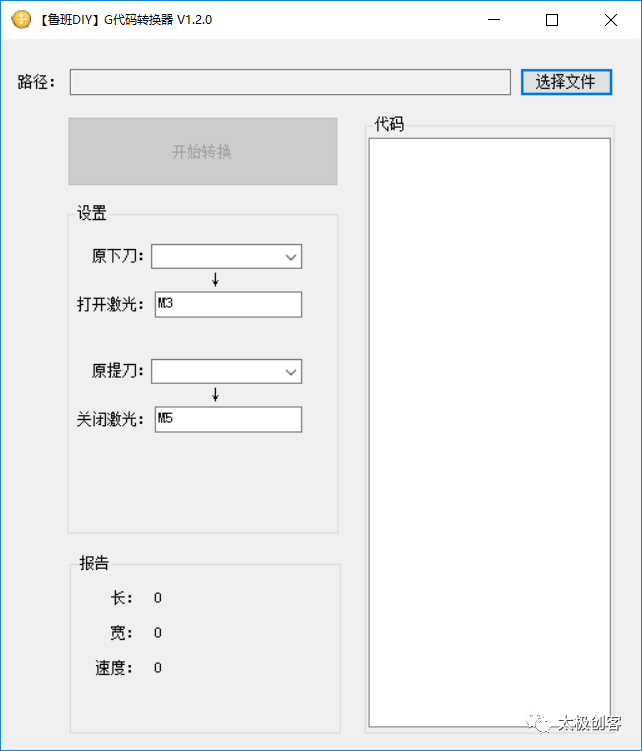
除此之外,软件包里面还附带了一个gcode小工具,我相信这对一些创客们来说是方便的。
下载链接: https://www.lanzous.com/i4nfnhc
4 Grbl Controller
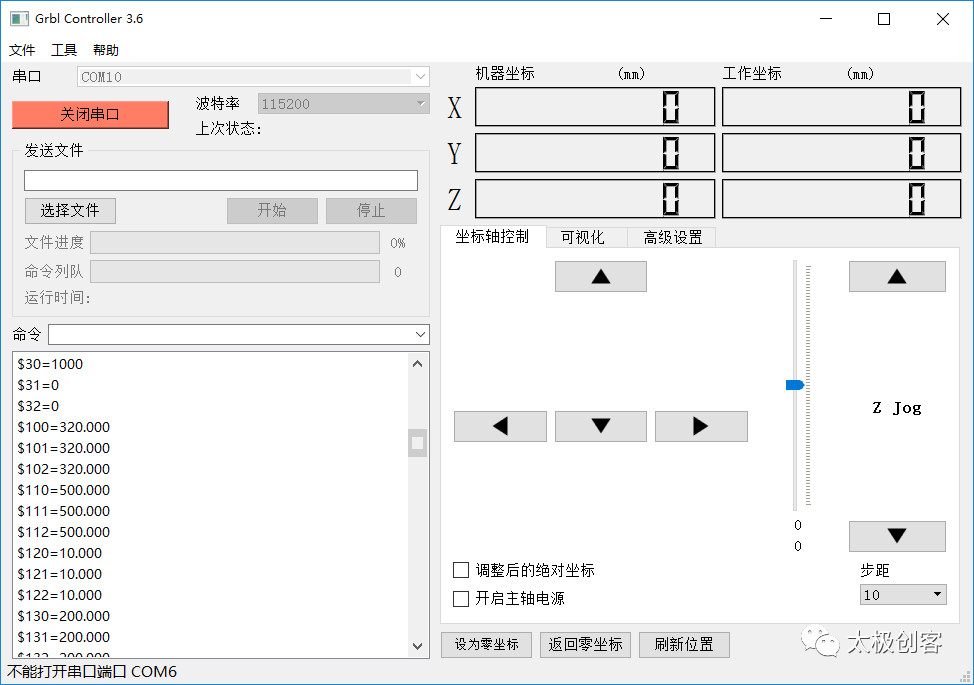
Grbl Controller是使用Qt跨平台库编写的。它通过QextSerialPort库的使用, 以简化选择正确的USB串行端口(其实在该方面开发过的朋友们知道对第三方库的使用有很多的好处,因此推荐的这个资源有很大的参考性)。
这是一款开源软件,您可以在以下链接可以找到源码,适合二次开发
http://zapmaker.org/projects/grbl-controller-3-0/
您也可以在这里下载它:https://www.lanzous.com/i4nfofg
5 LaserGRBL

跟上面几款上位机软件类似,功能大同小异,可能在集成角度来说没有前面的好一些,但是这款软件够稳定!
下载链接:https://www.lanzous.com/i4nfohi
XLoader——烧录工具
XLoader是一个Java编写的烧录器。
您可以用它给您的开发板烧录已经编译好的.HEX格式文件。
继上一期推出了三款免费开源三轴机械臂之后,很多小伙伴们说这些机械臂都做过了,有没有更猛的!
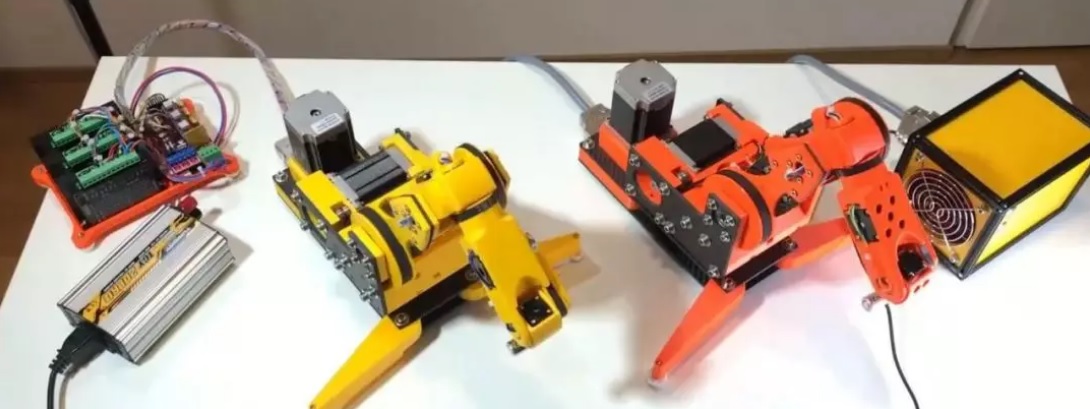
OK!本期我们要向大家介绍的是4款各具特色的六轴机械臂,依旧免费、依旧开源、依旧能在太极创客下载到全部资料!
之所以选择六轴,是因为这是一种更加灵活的组合,在此基础上能完成高效的动作。通过360度旋转、多维度伸缩,它打破了机械的局限。即使是固定在桌面上,成功完成远距离的复杂动作也不成问题。
1 Small Robot Arm 机械臂
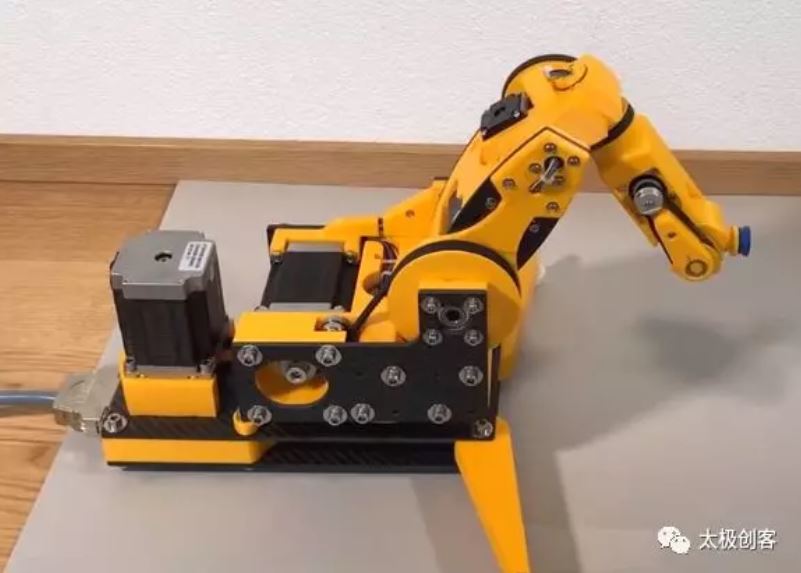
SmallRobotArm 具有出色的性能,可与一些工业机械臂相媲美!
1.机器人的精度约为0.1mm。
2.最高速度约为5.9厘米/秒。
3.最大有效载荷约为150-200克。
执行机构:由2个57步进电机,1个42步进电机,2个28步进电机和1个20步进电机组成,传动方式采用同步带传动,具有更高的精度。
主控板:Arduino Mega2560+RAMPS1.4,很多创客朋友们都熟悉的配置哦
驱动器:57步进电机与42步进电机由TB6560驱动,28步进电机和20步进电机由A4988驱动。
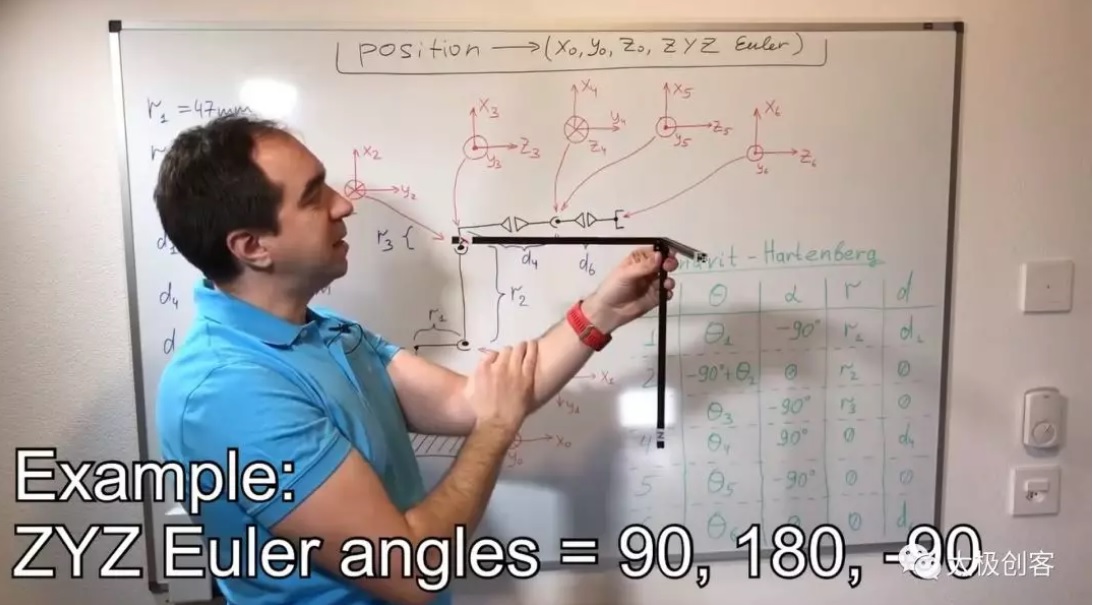
作者对固件里写有的6自由度机械臂的运动学正解和逆解的算法都进行了讲解(可在太极创客下载相关视频讲解),广大创客小伙伴们有福了。此外,该项目作者还开发了用于控制机械臂的手机APP(安卓版)和与其配合的蓝牙版固件,创客们可以用手机连接控制板来操作6自由度机械臂。
Small Robot Arm 机械臂资料下载链接:https://pan.baidu.com/s/1FcXhjypcXKUvZC9-5x2fCg 提取码: 5fs8
2. Niryo One机械臂
法国两个工程师Marc-Henri、Edouard热爱一切开源的产品,他们把熟悉的3D打印和Arduino、RaspberryPi结合,真的把这样一个“六轴”的小型机械手臂NiryoOne制作出来了!
开源的设计对用户更加友好,更多制造者能够参与进来。有条件的创客们能够自己打印组件与NiryoOne搭配使用,或者编写程序让NiryoOne做出高难度动作,让NiryoOne的潜在可能性尽可能地发挥出来。

手臂最大的功效其实是抓取物品,NiryoOne配有几种不同的抓手,对水平和垂直表面物品的抓力都不错。除了简单的张合以外,还有电磁力、抽管等辅助力量。
绘画、记事、下厨、3D打印、打孔、实物演示的家务活及工作琐事都能统统丢给它,顺便解放双手、节省下了时间成本。工程师还打算编写更加复杂的程序让它制作利器、变得更加好玩、以及更有交互效果,NiryoOne或许能做更多。
Niryo One机械臂资料下载链接: https://pan.baidu.com/s/19hWkRsBwcx7LoFMXDNarfA
提取码: hfb9
Niryo One机械臂官网:https://niryo.com/
3. Annin Robotics AR2机械臂

Annin Robotics AR2是一款开源的低成本机器人,任何人都可以自己制作。AR2可以使用铝制部件制造,也可以自行3D打印部件。
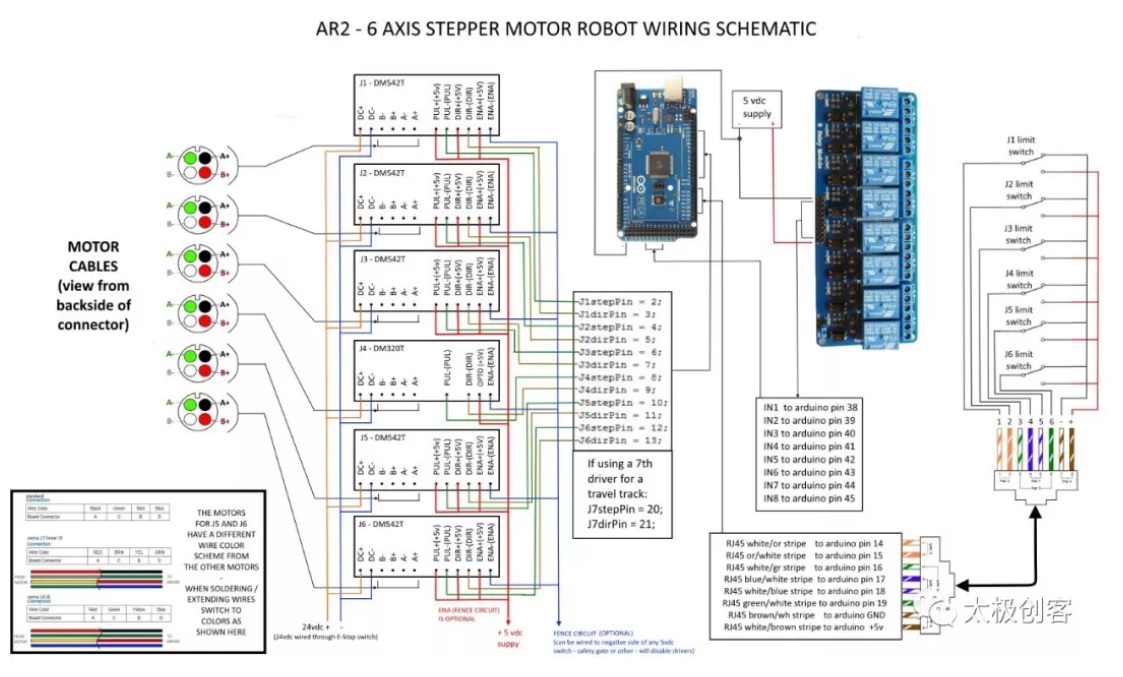
执行机构采用多个高精度行星齿轮减速步进电机,相对于同步带传动来说,成本高了不止一星半点哦。
3D打印文件,操作软件和组装手册可通过以下链接下载。
AR2的目标是创造一个低成本选项,以便任何人都可以构建一个6轴机器人,用于娱乐,教育或小型生产操作。
前方高能!相对于其他6轴机械臂来说,制作AR2机械臂的是很大的工程,对时间、精力、钱包、动手能力都是巨大的挑战哦。小伙伴们制作前可要考虑好了。
Annin Robotics AR2机械臂资料 下载链接: https://pan.baidu.com/s/112aRXIikfuJGO0rCr9v_OQ
提取码: 7yqi
Annin Robotics AR2机械臂官网:https://www.anninrobotics.com/
4. BCN3D MOVEO 机械臂

巴塞罗那科技组织BCN3D Technologies开发出一款开源的5轴机器人臂Moveo,该设备由一个Arduino微控制器驱动,能以较低的成本复制。
BCN3D是Fundació CIM的一个项目,其宗旨是改变世界的制造方式。

Moveo的一个重要部分是它的开源性质,与以往所有的项目一样,您可以在太极创客下载到其所有资料或找到此开源项目地址。
创客们可以获得Moveo的材料单、STL文件、可修改三维模型文件等信息,然后在家或在教室建造、定制自己的Moveo。
BCN3D MOVEO 机械臂资料下载链接: https://pan.baidu.com/s/1tu-jdso0nIq7mkJ1hPQ6aA
提取码: dryc
BCN3D MOVEO 机械臂官网:https://www.bcn3dtechnologies.com/en/bcn3d-moveo-the-future-of-learning/
本期太极创客为大家介绍的是很多创客朋友们都热衷的机械臂,机械臂分好多种。在这里,有跟MeArm相似的MK2机械臂、相比之下MK2在体积、载重、稳定性等方面都更加优秀!
也有步进电机驱动的机械臂,并带有PC端上位机,可轻松实现示教再现(动作记录)、搬运等功能;更有机器视觉实现抓取的机械臂……总有一款您喜欢的。
MK2 机械臂

这是一个3D打印机械臂臂,它是由以前较小的一个EEZYbotARM的版本迭代所得,所以简单地称它为MK2。

它更大更强,而且比EEZYbotARM具备更大的有效载荷。它没有明确的设计目的,为的只是给教育提供合适的硬件。
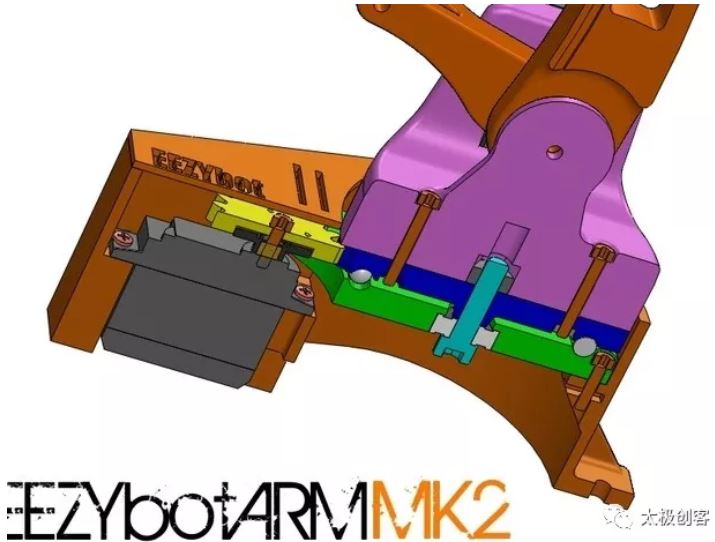
它以 ABB公司出品的 IRB 460工业机械臂为原型等比缩小(比例为1:7)。采用MG995舵机驱动,并且带有蓝牙APP上位机。上手难度不高,推荐新手。
MK2 机械臂资料下载(百度网盘)
提取码:aavb
搬运 机械臂

这个开源的3自由度机械臂项目是基于步进电机控制的,由3个42步进电机,1个28BYJ-48步进电机组成,传动方式采用齿轮啮合,具有更高的精度;

在主控板方面由Arduino Mega2560配合3D打印机扩展板RAMPS1.4/1.5;在驱动器方面,42步进电机由TB6560或A4988驱动;
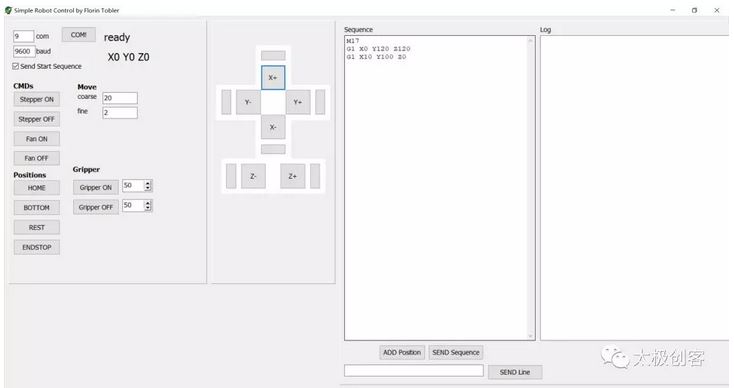
该机械臂的固件里写有3自由度机械臂的运动学算法,有基础的DIY爱好者可自行解读,然后根据自己的需要进行二次开发;同时该项目开发者还开发PC端上位机,使我们可以用电脑连接控制板来操作3自由度机械臂。
搬运机械臂资料下载(百度网盘)
提取码:3om6
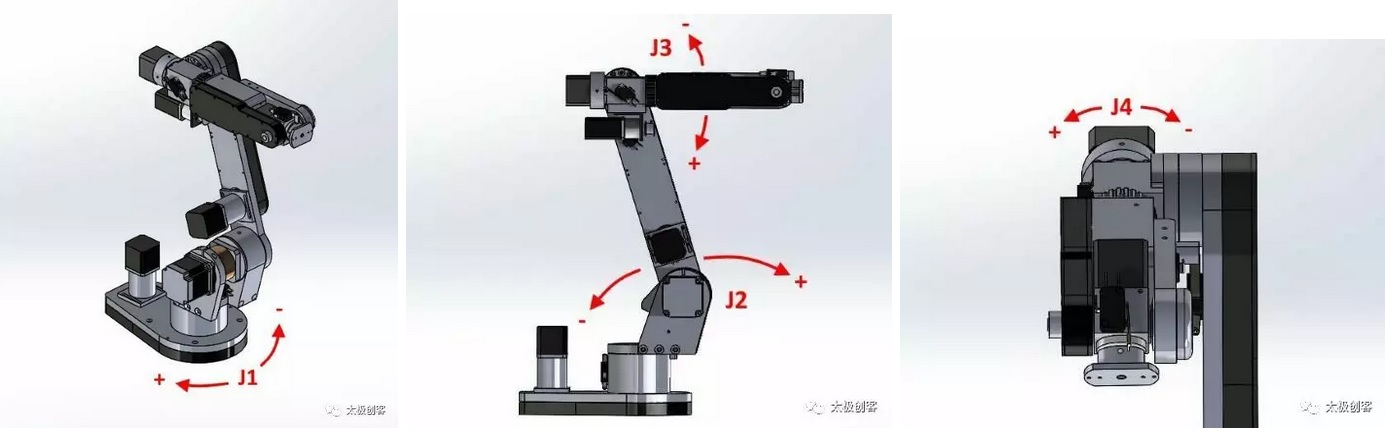
视觉抓取机械臂
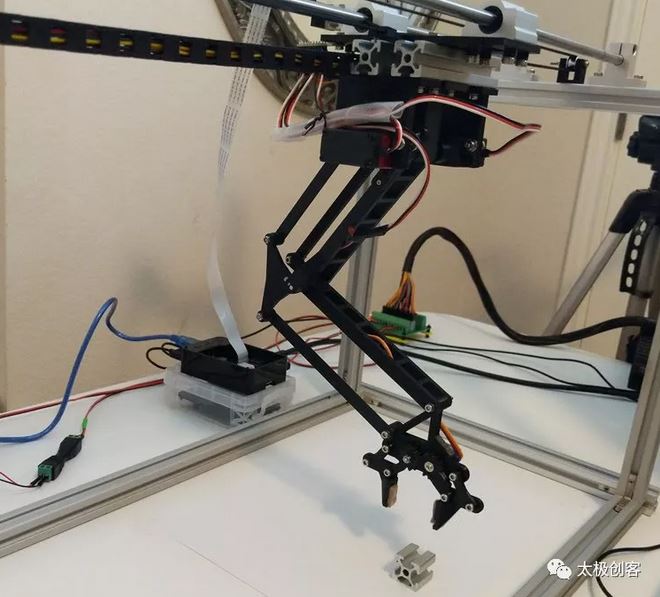
这是一种非常灵活的设计,配合摄像头可实现视觉抓取,并可以根据需要进行加强和改进。

正如您所见,这款机械臂上手难度较大,不建议新手制作,需要有一定开发经验、技术以及经费加持。
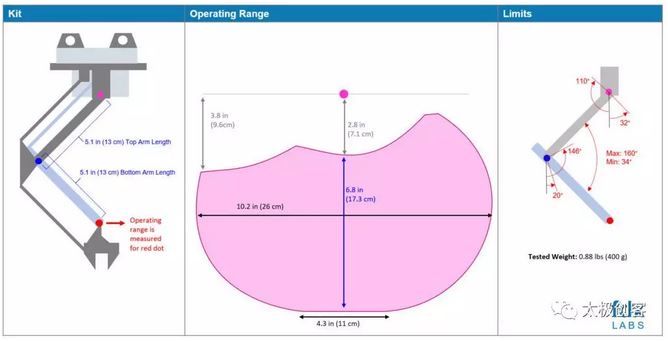
有效范围是在每个130毫米臂的未端测量(如图中红点所示)。操作范围与标准机械臂非常相似,但正如您在上图看到的,它旋转了90度,沿Y轴的位移更大。
臂可以支持广泛的运动,但由于其设计而具有一些机械限制。这些计算已经考虑在操作范围内,上图显示了您可以从该模型中获得的角度范围。
视觉抓取机械臂资料下载(百度网盘)
提取码:7lmg
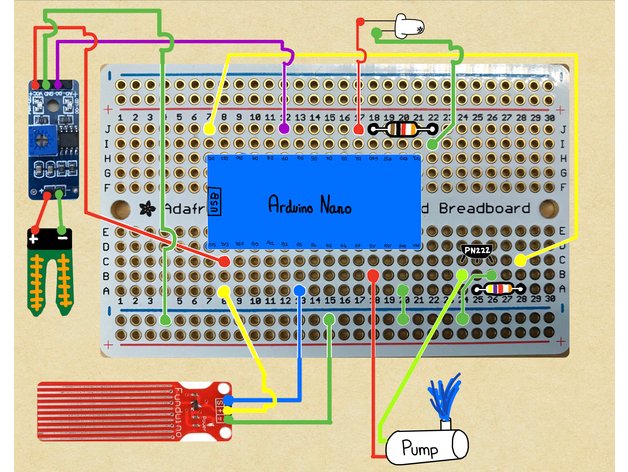
修正:4:05进入视频我错误地说使用20厘米电线连接水位传感器。正确的长度是35厘米。
针对现在人们繁忙的生活经常无法及时的给家里或者办公室里的盆栽浇水、浇灌方式不合理问题,基于Arduino设计了一款适用于室内盆栽智能化浇灌装置,用土壤温湿度传感器对土壤温湿度进行实时监测。
所有的电子元器件,泵和水箱都装在机构内,以让它看起来智能化。每个盆(如果你制作多个)也可以根据不同类型植物的需要进行设置。
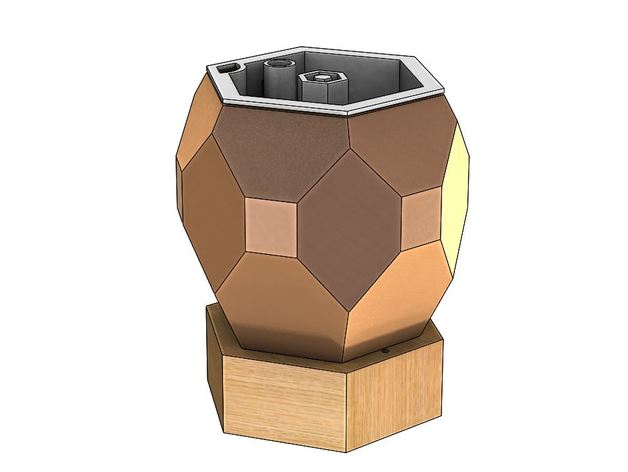
它由一个Arduino Nano控制,并且各个部件的成本很低。
详细制作说明以及软硬件资料可通过以下链接下载:
https://pan.baidu.com/s/12gRinSI0hNhcpjJXK6W2zQ
提取码:1ty3
以下是制作所需的材料清单:
– Arduino Nano
– 迷你水泵
– 水泵皮管
– 电阻(1k和4.7k)
– 杜邦线
– LED灯
– 水位传感器
– 螺母和螺钉
– 土壤湿度传感器
– 洞洞板
经过我们的努力,《零基础入门学用Arduino教程》系列最新教程“专项教程篇(电机部分)”已经基本完成,即将于近日与各位见面了。
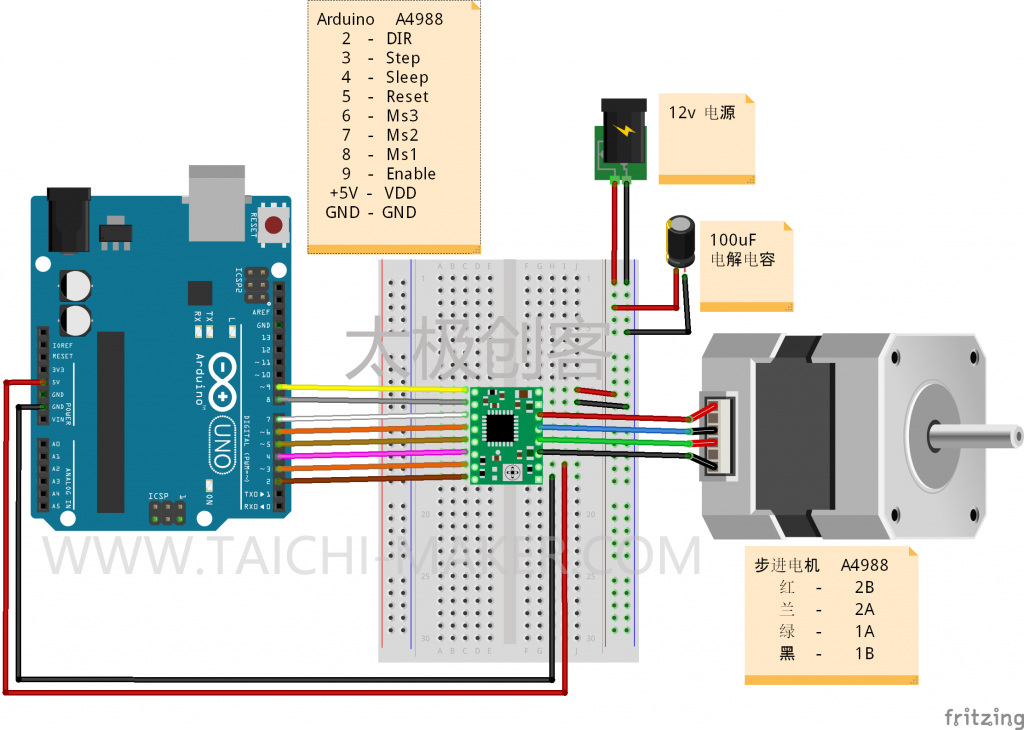
这一部分教程中,我们将应广大关心太极创客团队的朋友们要求,着重介绍如何使用Arduino控制电机的方法。
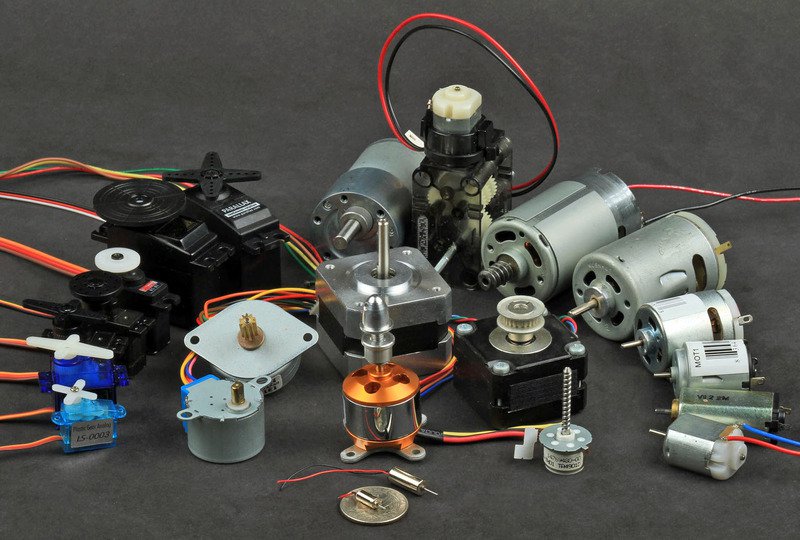
在这部分教程中,您将学会如何使用Arduino控制模型电机。

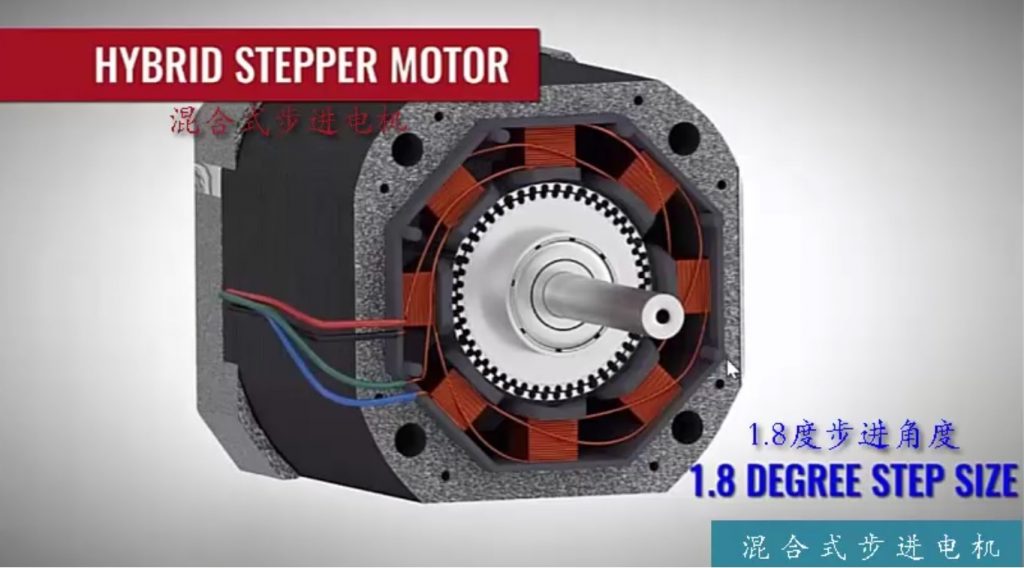
了解很多朋友都感到困扰的步进电机基本工作原理和控制方法。

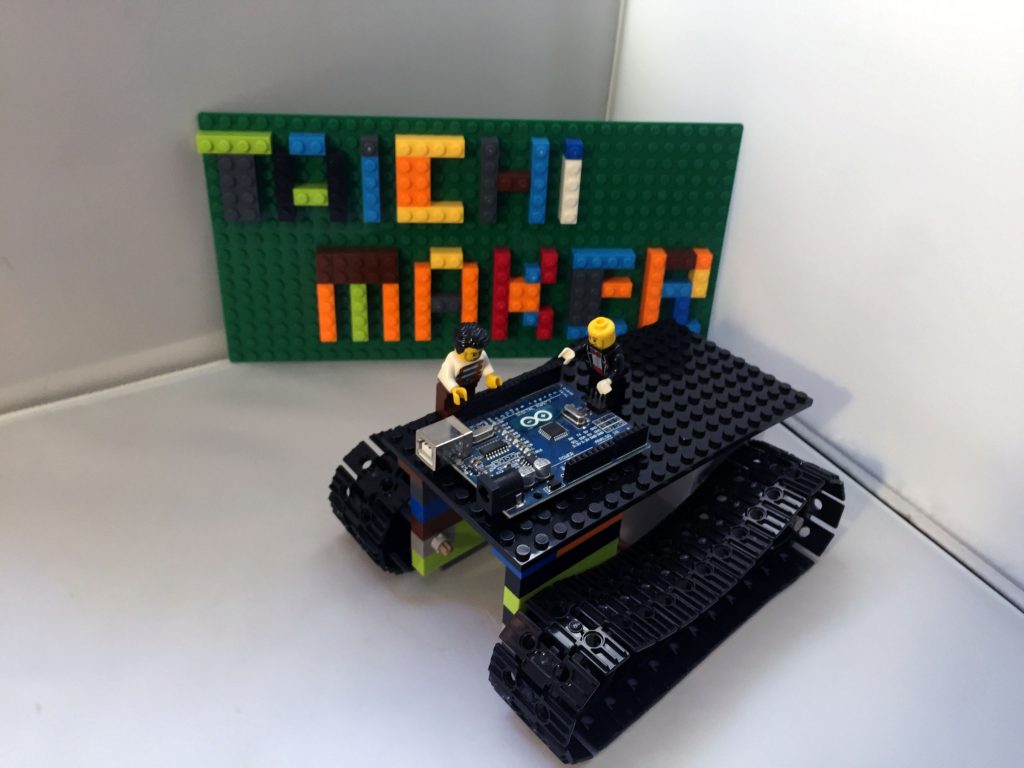
登上了Arduino控制电机的新大陆后,我们自然要试试身手,做一些有趣的项目。在这一期教程中我们还会向您展示一系列有趣的项目制作。其中之一就是如何将电机应用到乐高模型中。抛开那些价格昂贵的乐高电机配件,我们依然可以让心爱的模型”活”起来!
<- 返回“博客”首页
2013年1月,法国一位名叫盖尔·朗葛文(Gael Langevin)的雕塑家仅花了800美元(约合人民币4975元)就自创了一台真人大小的机器人。

当时已经有41岁的朗葛文说:“这件事的难度和组装宜家家居橱柜差不多,”并且每完成机器人身体的一部分,朗葛文都会与人分享他的制作过程以及所需的材料等。“有时我还会附加上一些程序的说明,这样机器人就可以识别人的语音命令了。”
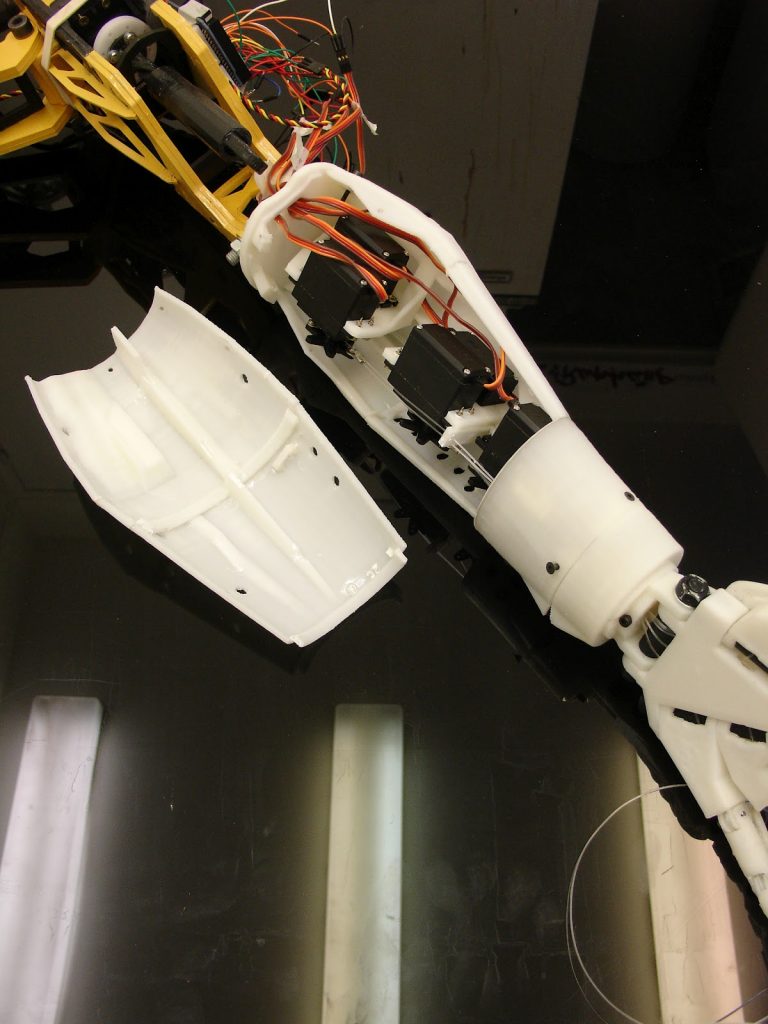
朗葛文表示:“现在机器人InMoov可以实现抓东西、摇晃头部以及伸展手臂的功能,当我给它制造脚时,我想事情会变得更加有趣。”
朗葛文承认自己在制造机器人方面还是一个新人,为了让机器人的手臂可以移动,在制造过程中朗葛文还自学Arduino微控制器编程以及很多电子知识。
InMoov的核心控制器是Arduino Mega以及Arduino Uno 。如您对这款机器人感兴趣并且希望获得制作InMoov的所有3D打印文件等信息,请您前往: